I am in the process of learning the URDF for gazebo course. And I applied the knowledge taught in my project. But I have problems configuring the joints. I have 2 joints attached to the motor so I configured it as continous, however for the other joints it is dependent on the movement of the 2 continous joints above. I don’t know how to configure it? Please help me. Or at least can you tell me what course this is in and where do I need to learn it?
Hi,
I see here several issues:
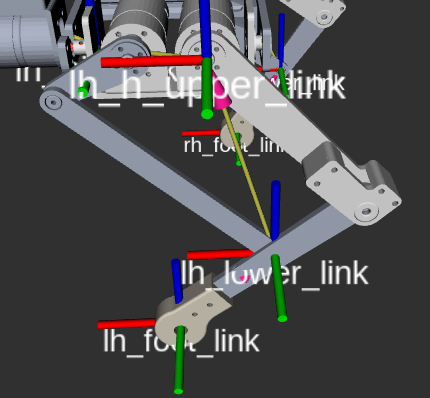
- The first and most important is that this seems a Closed kinematic chain, right?
By closed chain means that the kinematic chain has several branches that diverge in one point ( in your case brom the body, to the two different motors, and after they rejoin in the lh_lower_link ).
THIS is NOT possible in URDFs, it doesn’t have support for this. To be able to use this , you have to define the robot in SDF format directly.
We don’t have a course where we explain SDF, but we do have a very simple video example, old, but still aplies.
Essentially you need to create the controllers and everything inside SDF.
Its a bit more cumbersome because you ar enot using directly the tools that URDF and XACRO give you. Here is the video: CLOSED KIN CAHIN VIDEO
Another option, which is what a lot of robotics developers use, is to “FAKE that joint”.
This means that in simulation, you don’t really connect that link, and you create a control in a way that it behaves as if it’s connected.
They even remove those joints altogether because from the simulation point of view, it doesn’t help much. I would try to only leave the main leg and remove that element altogether.
I know that it’s simplifying the physical system, but Gazebo wasn’t really designed to do very serious and complex physics simulations, it’s more intended for high-level robotics control.
Here you have an example of a robot arm that has “FAKE CLOSED KINEMATIC CHAINS” : ARMS URDF FAKE CLOSED CHAINS
Hope this helps
1 Like
Thank you, I am following your instructions. I want to ask, in which course can I find tutorials related to this 4-legged robot?
Hi,
In this course: ROS2 Control, you use a four legued robot ![]()
1 Like
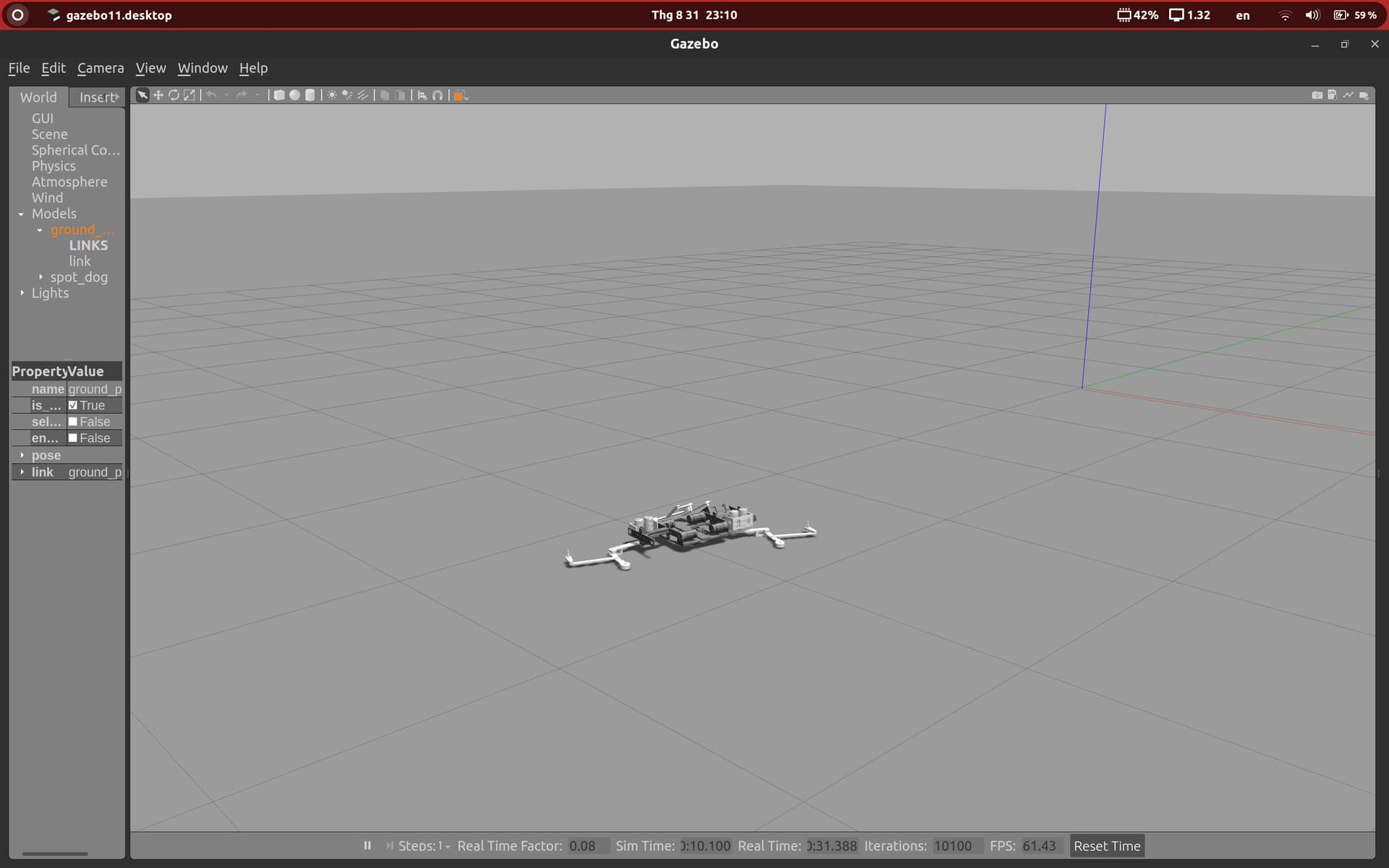
I found the Solo dog course, thank you for your enthusiasm. Now, I’m still having problems building the model for my personal project. I exported the model from Solid file to URDF, but when I ran the gazebo file this error occurred: 1 leg was missing and the robot was unstable. Please let me know I was having problems in pain, if you need more information about the URDF file, I will provide it for you.
Hi, The best way is that you create a Rosject with all the code an share it here.
You can also share a git with instructions on how to launch and setup so that I can have a look and see what might be the problem
1 Like
Github: GitHub - duygiang1162/CreatorRobot: TF + URDF
User: client
Pass: 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
I have uploaded it to Github. If you’re wondering about the URDF file, I exported it from Solidworks, but I’m not sure about placing the axes correctly. Thank for your help.
I ran:
roslaunch gazebo_ros empty_world.launch
roslaunch export5_URDF spawn_dog.launch
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.