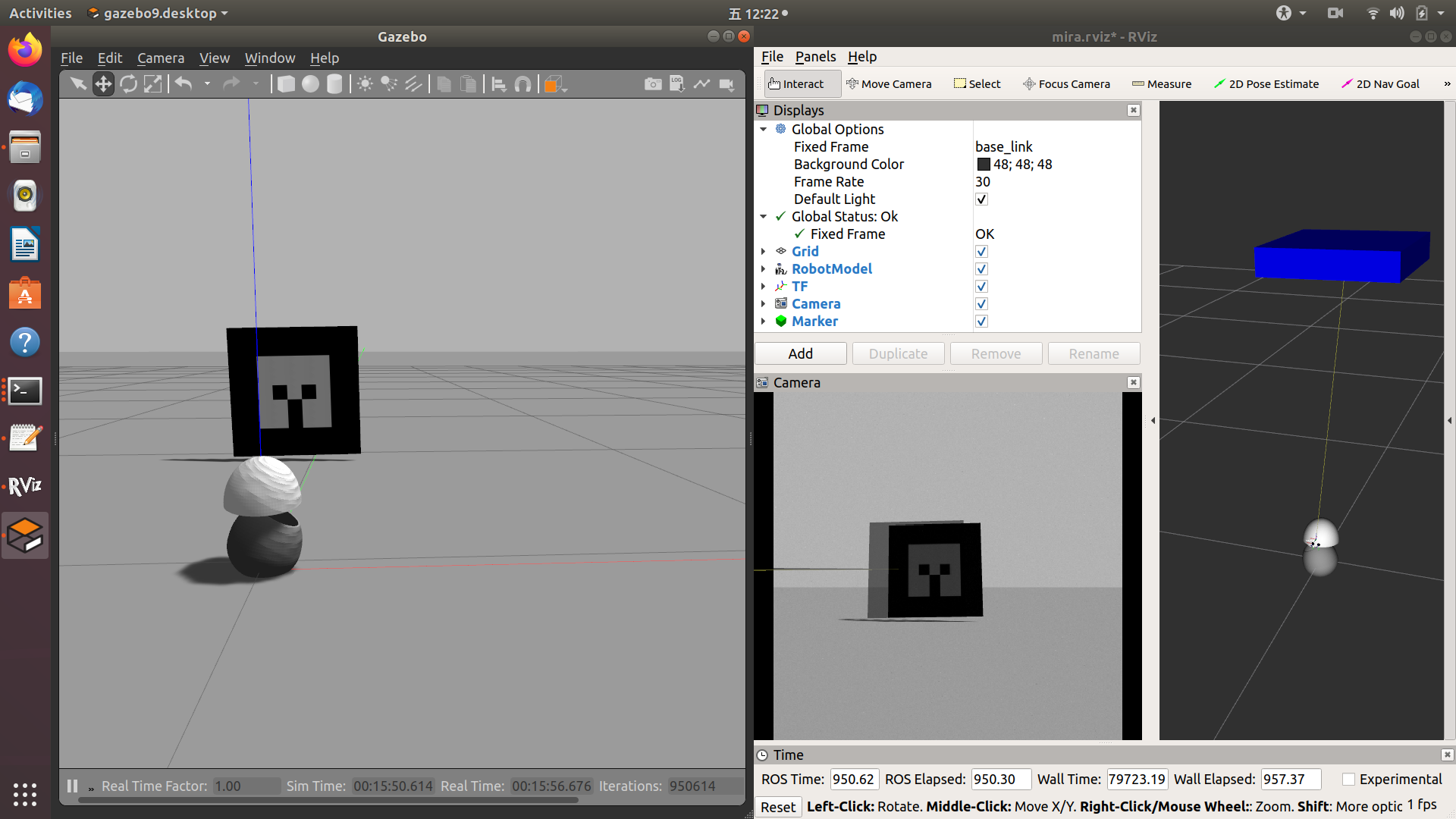
Hi, when I use the simulate camera in gazebo to track the ar tag , the visual marker pose is not correct.As you can see, the tag is front of robot mira, not in the above of it. And sometimes the id is also wrong. I use id 1 but the node publish 255.I am so confused about that , help !!!
My launch code:
<node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen">
<param name="marker_size" type="double" value="40" />
<param name="max_new_marker_error" type="double" value="0.1" />
<param name="max_track_error" type="double" value="0.2" />
<param name="output_frame" type="string" value="camera_optical_link"/>
<remap from="camera_image" to="/mira/camera1/image_raw"/>
<remap from="camera_info" to="/mira/camera1/camera_info"/>
</node>
And the camera_optical_link is a frame whose z_axis align with camera optical axis.
