Hi all,
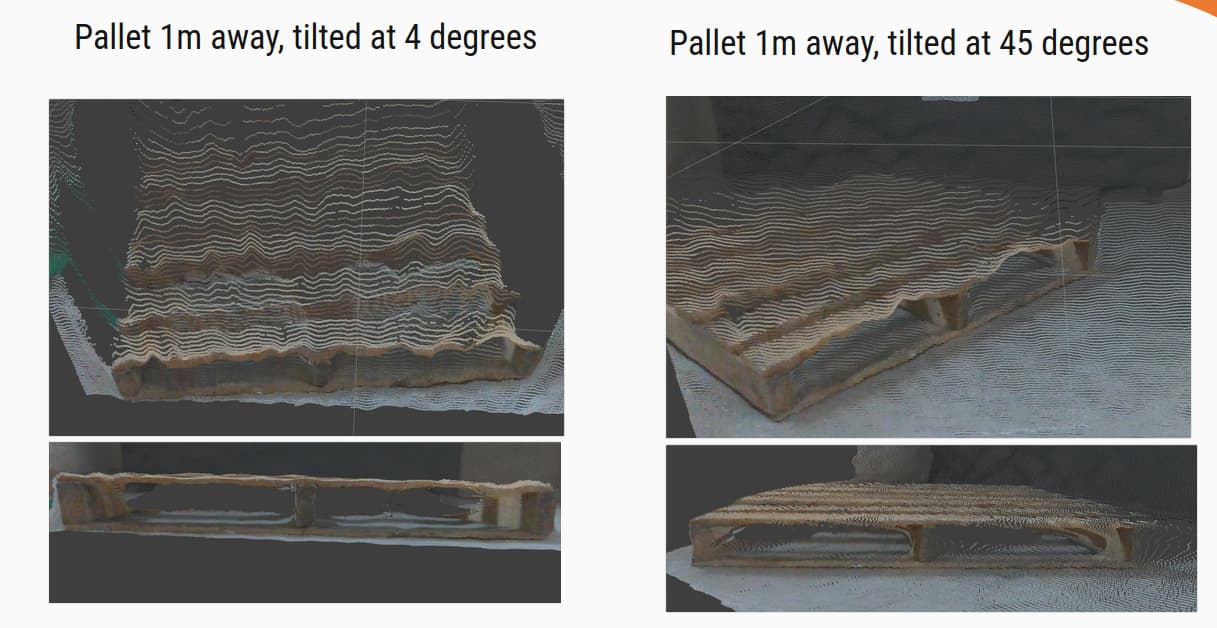
I am working on collecting point cloud data of a pallet using Intel realsense 435 depth camera. The pallet is placed 1m away from the camera and is kept at an angle of 4 degrees.
I am collecting the point cloud data generated by the depth camera. Upon running it through rviz, the output was very noisy. Areas that should have a sharp edge are coming out as wavy.
I do not know specifically what the issue is, but I’m guessing it has to do with the provider of the sensor data, the camera. More specifically, the ROS/ROS 2 driver you are running on it (assuming of course you are using ROS/ROS 2).
The Intel 435 has ROS drivers made by Intel themselves, and here is a list of the parameters you can tune to obtain a different result. Maybe reducing the clip_distance can improve those resolution results.
Another thing you can do with noisy sensors is to apply a filter, for example, a Gaussian filter. Here you can find a ROS repository with many PCL filters for Noetic.
I guess my final question would be: Why do you need it to be perfect? There will always be noise in sensors in the real world, that is just unavoidable. With better hardware, it can be improved (a much more expensive camera will provide sharper results I’m sure).
Does your application require precise resolution or can it be worked on as-is?
I expect noise in real world conditions, i can always perform smoothening on it, but as you can see in the image, the entire top front end is missing. Even if i perform smoothening here, the actual edge cannot be recoverd?
Note: clip_distance excludes data beyond the mentioned threshold, but does not affect the quality of depth data.
I will continue to work with the realsense parameters.
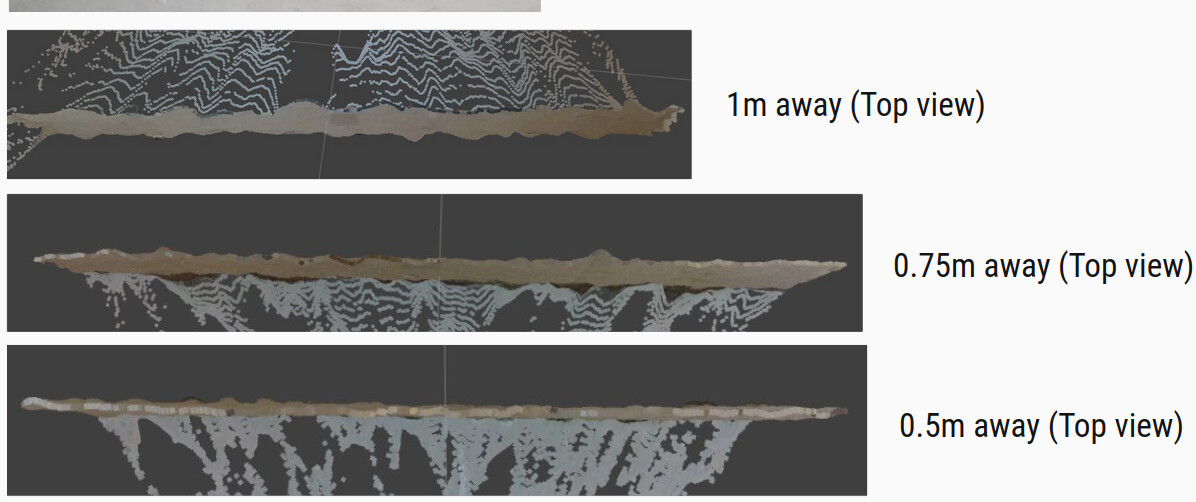
Hi, upon furthur experimentation, when i moved the camera closer to the pallet, that is less than 0.75m, the accuracy improved, best was at 0.5m from camera.
Guess the intel depth camera accuracy drops after 0.75m.