Hi guys!
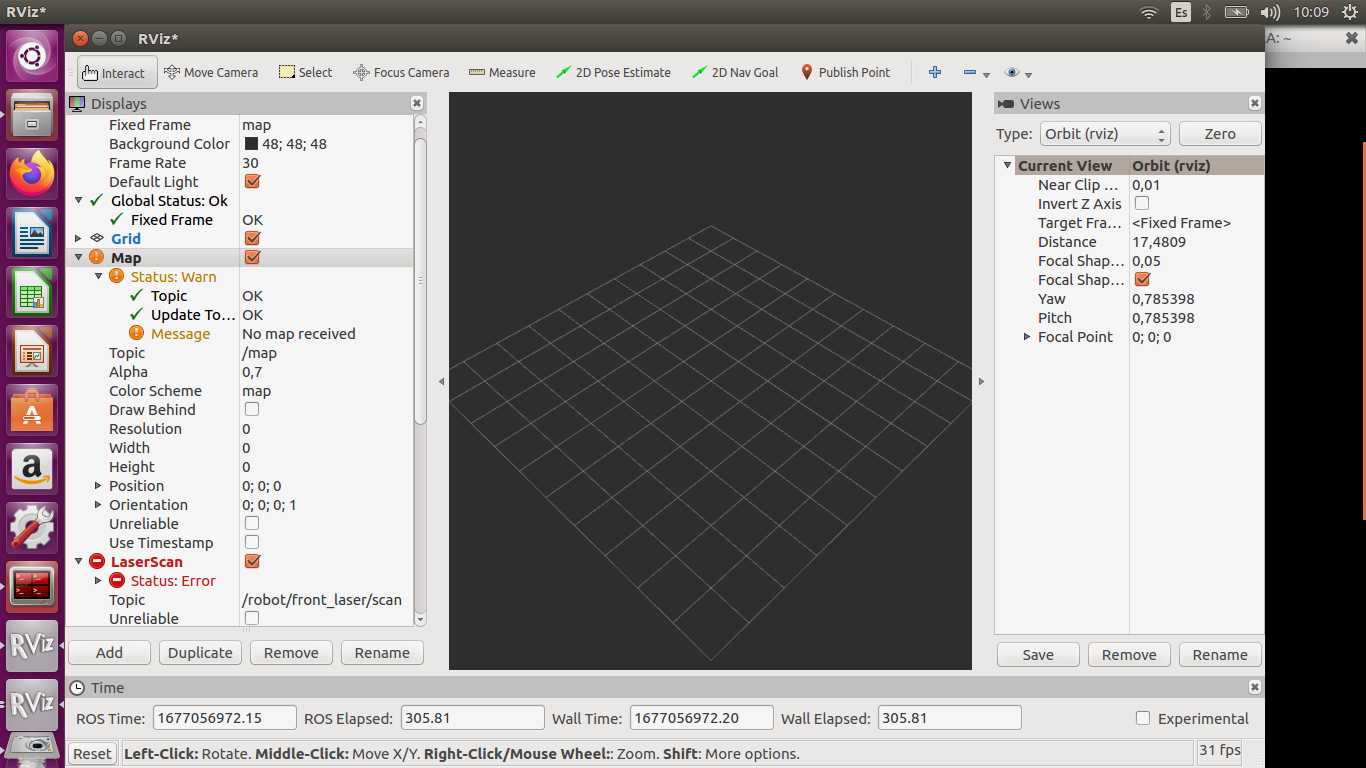
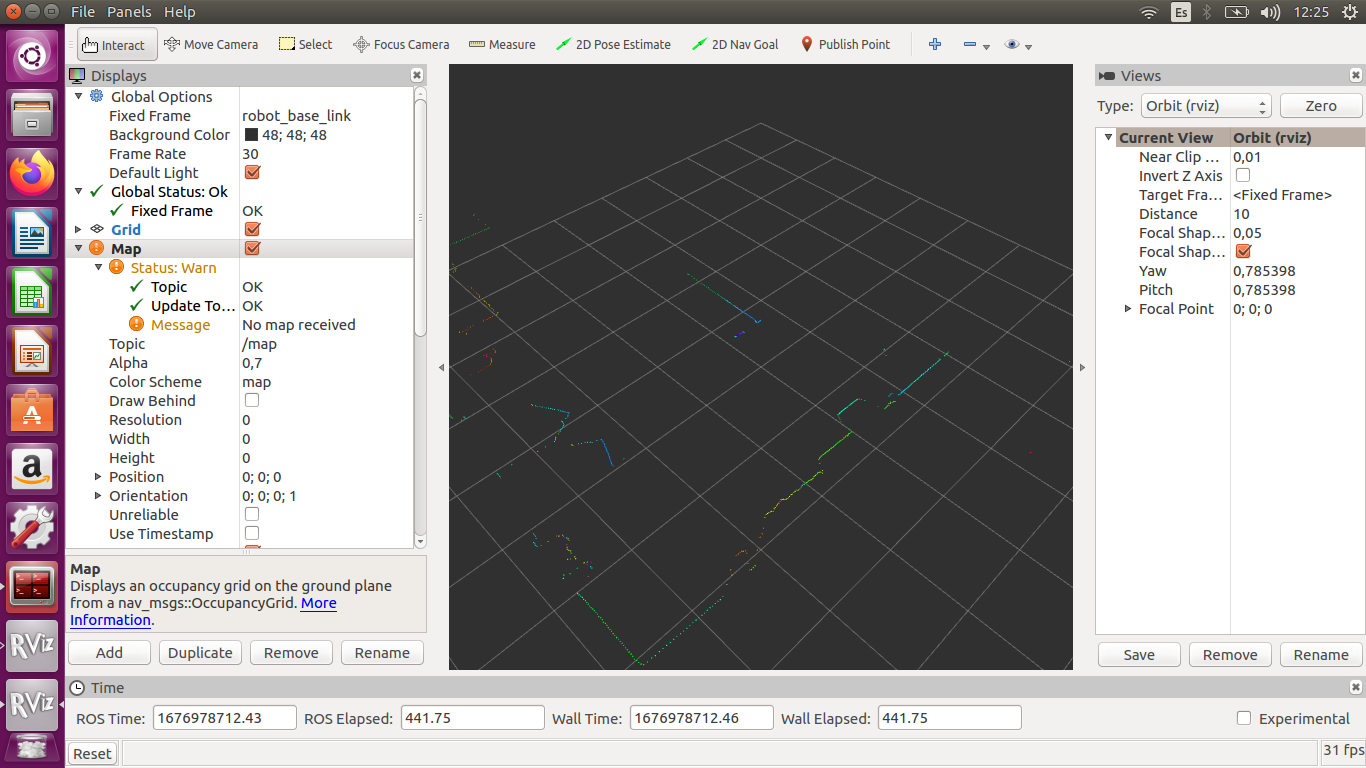
We have an issue with our SUMMIT HL - ROS Kinetic about creating maps. At the time that we want to create/see the map at RVIZ, it appears a WARNING message of “No map received” on the section “Map” as you can see in the screenshot.
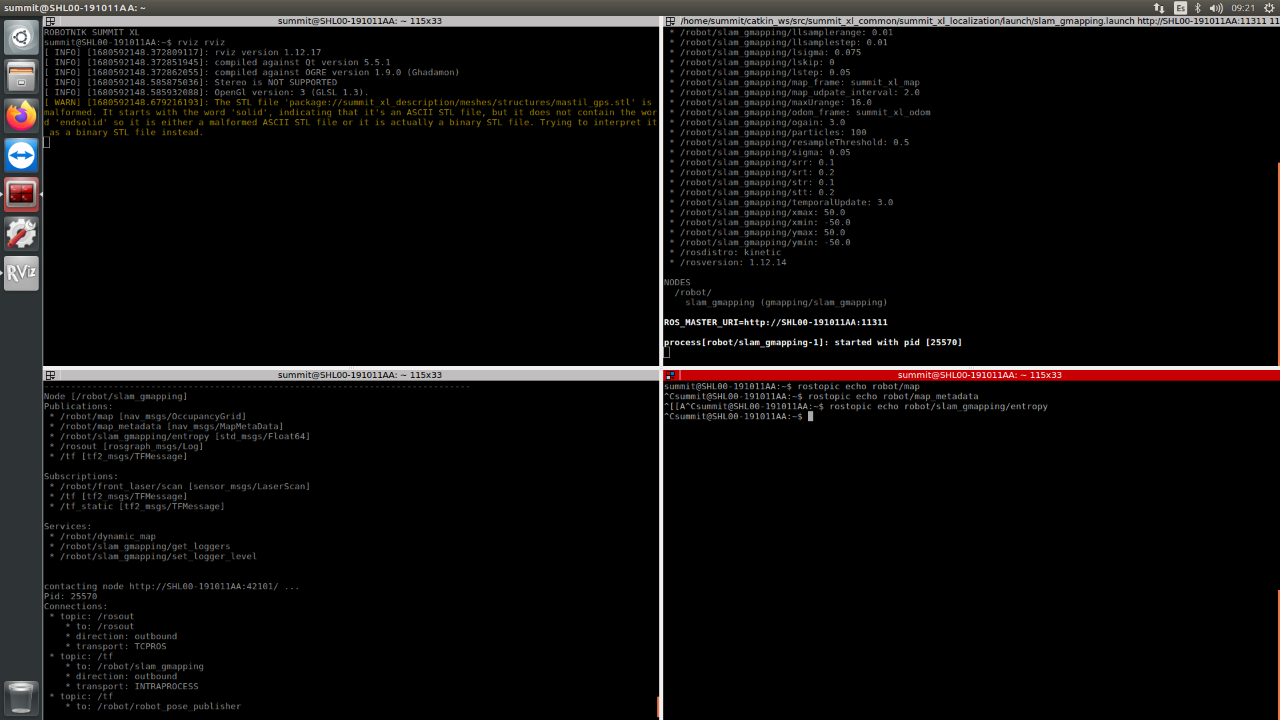
We had tried 2 different commands to create/launch the maps. The first one is “roslaunch summit_xl_localization slam_gmapping.launch”, and the second one is “rosrun map_server map_saver -f testmap1”, but either worked.
The response of the first command is:
summit@SHL00-191011AA:~$ roslaunch summit_xl_localization slam_gmapping.launch
… logging to /home/summit/.ros/log/0345347c-b1d9-11ed-b1bb-0030180d6edc/roslaunch-SHL00-191011AA-3126.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://SHL00-191011AA:33415/
SUMMARY
========
PARAMETERS
-
- /rosdistro: kinetic*
-
- /rosversion: 1.12.14*
-
- /slam_gmapping/angularUpdate: 0.1*
-
- /slam_gmapping/astep: 0.05*
-
- /slam_gmapping/base_frame: summit_xl_base_link*
-
- /slam_gmapping/delta: 0.05*
-
- /slam_gmapping/iterations: 5*
-
- /slam_gmapping/kernelSize: 1*
-
- /slam_gmapping/lasamplerange: 0.005*
-
- /slam_gmapping/lasamplestep: 0.005*
-
- /slam_gmapping/linearUpdate: 0.2*
-
- /slam_gmapping/llsamplerange: 0.01*
-
- /slam_gmapping/llsamplestep: 0.01*
-
- /slam_gmapping/lsigma: 0.075*
-
- /slam_gmapping/lskip: 0*
-
- /slam_gmapping/lstep: 0.05*
-
- /slam_gmapping/map_frame: summit_xl_map*
-
- /slam_gmapping/map_udpate_interval: 2.0*
-
- /slam_gmapping/maxUrange: 16.0*
-
- /slam_gmapping/odom_frame: summit_xl_odom*
-
- /slam_gmapping/ogain: 3.0*
-
- /slam_gmapping/particles: 100*
-
- /slam_gmapping/resampleThreshold: 0.5*
-
- /slam_gmapping/sigma: 0.05*
-
- /slam_gmapping/srr: 0.1*
-
- /slam_gmapping/srt: 0.2*
-
- /slam_gmapping/str: 0.1*
-
- /slam_gmapping/stt: 0.2*
-
- /slam_gmapping/temporalUpdate: 3.0*
-
- /slam_gmapping/xmax: 50.0*
-
- /slam_gmapping/xmin: -50.0*
-
- /slam_gmapping/ymax: 50.0*
-
- /slam_gmapping/ymin: -50.0*
NODES
- /*
- slam_gmapping (gmapping/slam_gmapping)*
ROS_MASTER_URI=http://SHL00-191011AA:11311
process[slam_gmapping-1]: started with pid [3271]
However, at the end, we couldn’t visualize any map in RVIZ. It show us the message that we can in the screenshot above (WARNING message") any anything else.
On the other hand, with the second command where we tried to save the map, but it didn’t work either. It just kept on the mode of “waiting”
summit@SHL00-191011AA:~$ rosrun map_server map_saver -f testmap1
[ INFO] [1676978954.952244712]: Waiting for the map
We didn’t know if that issue occurs because of the robot’s configuration, or we are doing something wrong.
Also, we had tried to download the robot’s packages from GibHub (“summit_xl_robot”) to correct any kind of possibles mistakes, but they are not available on the website, so not change on that way.
Likewise, we tried different launch files to create the map, but any of them had worked.
We will apprecite if you can give us a hand…
Thanks, guys!