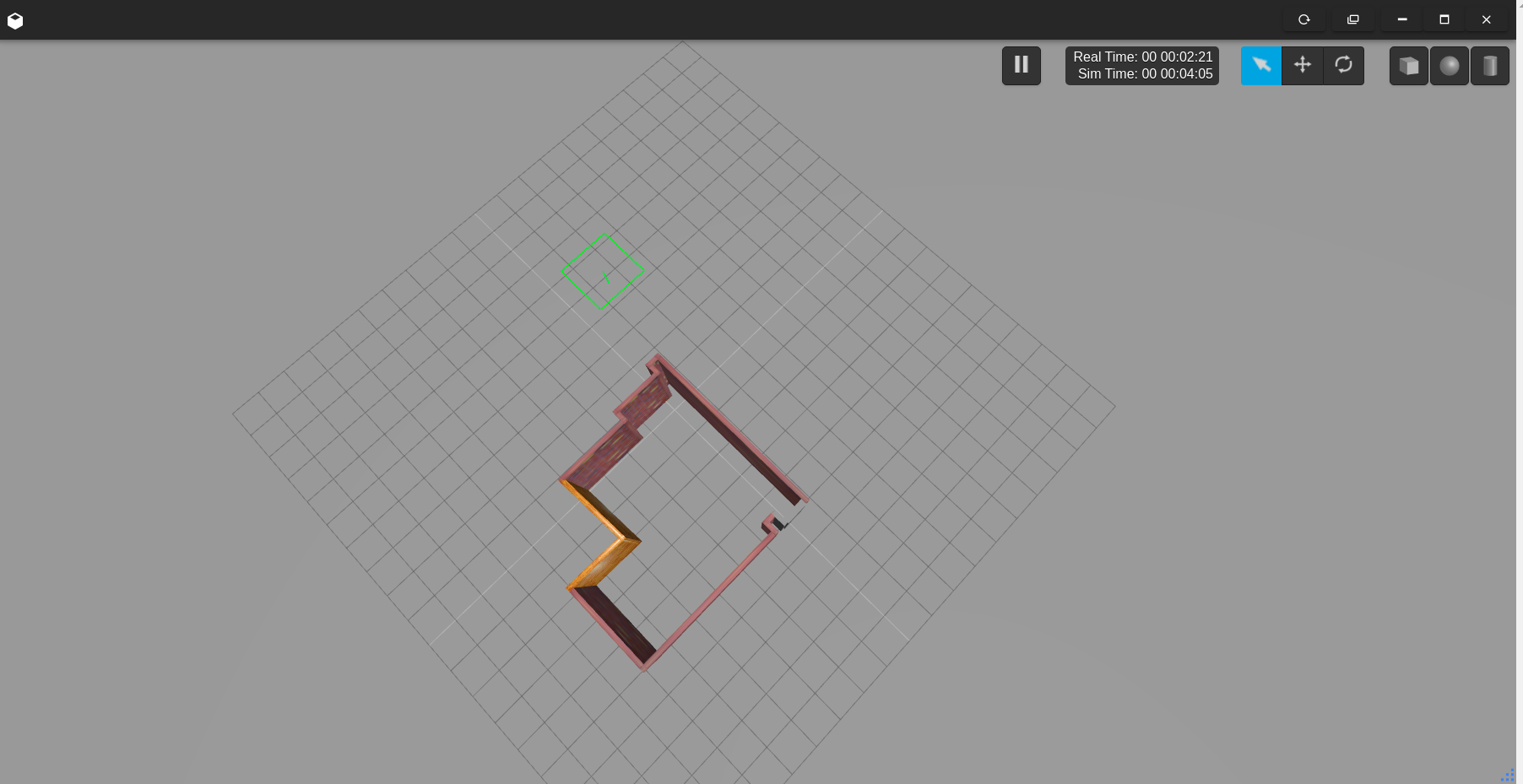
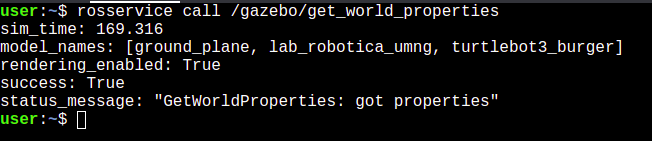
Hi, i have this spawn_burger.launch file. it loads a world i made, and a i am trying to spawn a tb3 burger to the world, i already installed tb3 packages and i tried this locally and it works, but when i try to run it on the RDS the tb3 burger won’t apear. the shell says that is loaded but i can no see it. Does anyone knows what i am missing?
<launch>
<!-- gazebo launch with empty world and loading the new model we have created-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find proyecto_de_grado)/world/lab_robotica2.world" />
</include>
<!-- uploading urdf robot model into parameter server -->
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_burger.urdf.xacro"/>
<!-- from parameter server spawn model into gazebo -->
<node pkg="gazebo_ros" type="spawn_model" name="spawn_urdf" args="-urdf -model turtlebot3_burger -param robot_description" />
<!-- publisher transform for all joint and thier inbetween relations -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name ="publish_frequency" type=" double" value="50.0"/>
</node>
</launch>