Hi, I followed your guide to add a lidar sensor and use the lidar plugin but it does not work as same as the guide.
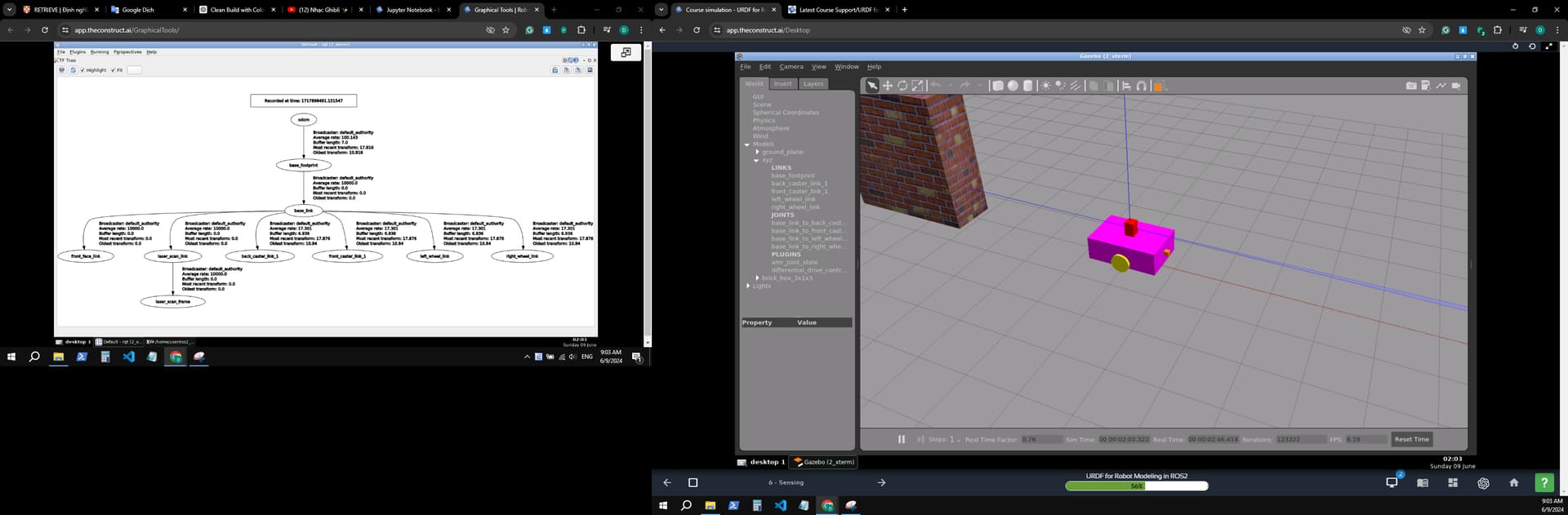
Although the gazebo showed the laser_scan_link but I do not see the link, the joint in the list of link, and the joint in Gazebo Models. Why?
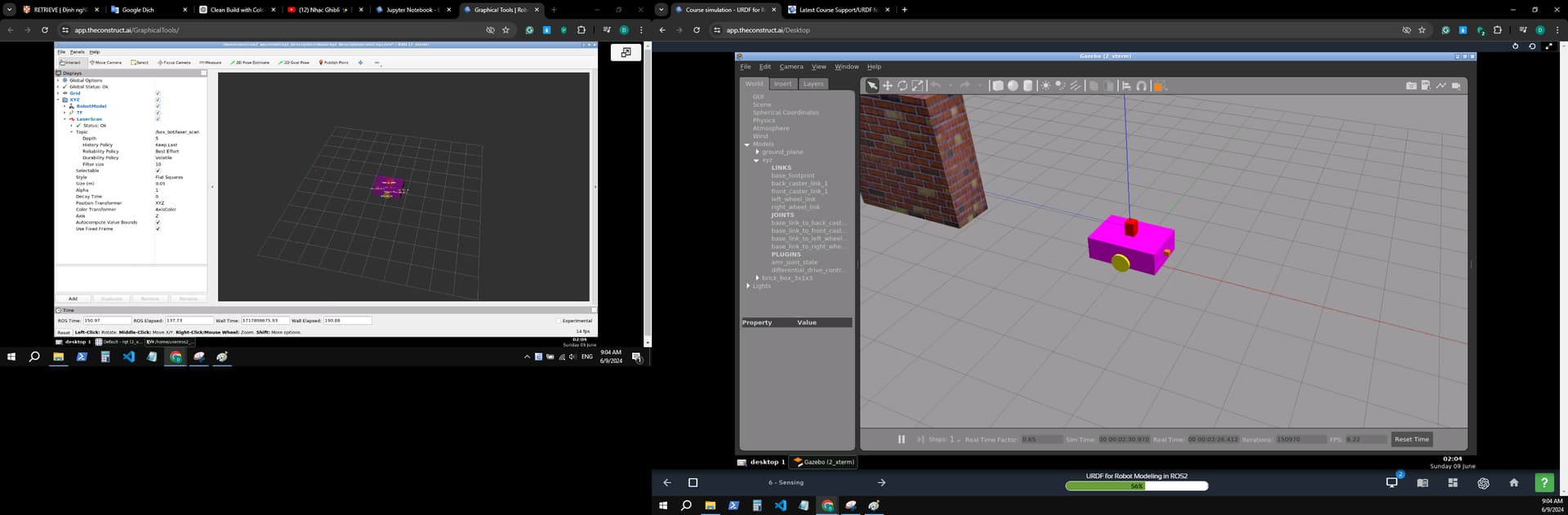
I added some obstacles but the lidar data is very weird. Could you explain why?
Thanks
I send my urdf file.
<?xml version="1.0"?>
<!-- xacro:property -->
<xacro:property name="base_link_distance" value="0.1" />
<xacro:property name="base_link_x" value="1.5" />
<xacro:property name="base_link_y" value="1.0" />
<xacro:property name="base_link_z" value="0.5" />
<xacro:property name="base_link_mass" value="0.2" />
<xacro:property name="front_face_link_x" value="0.1" />
<xacro:property name="front_face_link_y" value="0.1" />
<xacro:property name="front_face_link_z" value="0.1" />
<xacro:property name="front_face_link_mass" value="0.1" />
<xacro:property name="wheel_link_radius" value="0.2" />
<xacro:property name="wheel_link_length" value="0.1" />
<xacro:property name="wheel_link_mass" value="0.2" />
<xacro:property name="caster_link_radius" value="0.1" />
<xacro:property name="caster_link_mass" value="0.2" />
<xacro:property name="laser_scan_link_x" value="0.2" />
<xacro:property name="laser_scan_link_y" value="0.2" />
<xacro:property name="laser_scan_link_z" value="0.3" />
<xacro:property name="laser_scan_link_mass" value="0.1" />
<!-- Materials -->
<material name="yellow">
<color rgba="0.8 0.8 0 1"/>
</material>
<material name="purple">
<color rgba="0.8 0 0.8 1"/>
</material>
<material name="brown">
<color rgba="0.8 0.4 0 1"/>
</material>
<material name="red">
<color rgba="1.0 0 0 1"/>
</material>
<!-- root - base_footprint -->
<link name="base_footprint" >
</link>
<!-- base_link -->
<joint name="base_footprint_to_base_link_joint" type="fixed">
<origin xyz="0 0 ${base_link_z/2+base_link_distance}" rpy="0 0 0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
<link name="base_link" >
<visual>
<geometry>
<box size="${base_link_x} ${base_link_y} ${base_link_z}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="purple" />
</visual>
<collision>
<geometry>
<box size="${base_link_x} ${base_link_y} ${base_link_z}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<inertial>
<mass value="${base_link_mass}" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="${base_link_mass*(base_link_y*base_link_y+base_link_z*base_link_z)/12}" ixy = "0" ixz = "0"
iyy="${base_link_mass*(base_link_x*base_link_x+base_link_z*base_link_z)/12}" iyz = "0"
izz="${base_link_mass*(base_link_x*base_link_x+base_link_z*base_link_z)/12}" />
</inertial>
</link>
<gazebo reference="base_link">
<material>Gazebo/Purple</material>
</gazebo>
<!-- front_face_link -->
<joint name="base_link_to_front_face_link_joint" type="fixed">
<origin xyz="${base_link_x/2+front_face_link_x/2} 0 0" rpy="0 0 0"/>
<axis xyz="0 0 0"/>
<parent link="base_link"/>
<child link="front_face_link"/>
</joint>
<link name="front_face_link" >
<visual>
<geometry>
<box size="${front_face_link_x} ${front_face_link_y} ${front_face_link_z}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="brown" />
</visual>
<collision>
<geometry>
<box size="${front_face_link_x} ${front_face_link_y} ${front_face_link_z}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<inertial>
<mass value="${front_face_link_mass}" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="${front_face_link_mass*(front_face_link_y*front_face_link_y+front_face_link_z*front_face_link_z)/12}" ixy = "0" ixz = "0"
iyy="${front_face_link_mass*(front_face_link_x*front_face_link_x+front_face_link_z*front_face_link_z)/12}" iyz = "0"
izz="${front_face_link_mass*(front_face_link_x*front_face_link_x+front_face_link_z*front_face_link_z)/12}" />
</inertial>
</link>
<gazebo reference="front_face_link">
<material>Gazebo/Orange</material>
</gazebo>
<!-- left_wheel_link -->
<joint name="base_link_to_left_wheel_link_joint" type="continuous">
<origin xyz="0 ${base_link_y/2} ${wheel_link_radius-(base_link_distance+base_link_z/2)}"
rpy="-1.57 0 0"/>
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
</joint>
<link name="left_wheel_link">
<visual>
<geometry>
<cylinder radius="${wheel_link_radius}" length="${wheel_link_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow" />
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_link_radius}" length="${wheel_link_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<inertial>
<mass value="${wheel_link_mass}" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="${wheel_link_mass*(3*wheel_link_radius*wheel_link_radius+wheel_link_length*wheel_link_length)/12}" ixy = "0" ixz = "0"
iyy="${wheel_link_mass*(3*wheel_link_radius*wheel_link_radius+wheel_link_length*wheel_link_length)/12}" iyz = "0"
izz="${wheel_link_mass*(wheel_link_radius*wheel_link_radius)/2}" />
</inertial>
</link>
<gazebo reference="left_wheel_link">
<material>Gazebo/Yellow</material>
</gazebo>
<!-- right_wheel_link -->
<joint name="base_link_to_right_wheel_link_joint" type="continuous">
<origin xyz="0 ${base_link_y/2*-1} ${wheel_link_radius-(base_link_distance+base_link_z/2)}"
rpy="-1.57 0 0"/>
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
</joint>
<link name="right_wheel_link" >
<visual>
<geometry>
<cylinder radius="${wheel_link_radius}" length="${wheel_link_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow" />
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_link_radius}" length="${wheel_link_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<inertial>
<mass value="${wheel_link_mass}" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="${wheel_link_mass*(3*wheel_link_radius*wheel_link_radius+wheel_link_length*wheel_link_length)/12}" ixy = "0" ixz = "0"
iyy="${wheel_link_mass*(3*wheel_link_radius*wheel_link_radius+wheel_link_length*wheel_link_length)/12}" iyz = "0"
izz="${wheel_link_mass*(wheel_link_radius*wheel_link_radius)/2}" />
</inertial>
</link>
<gazebo reference="right_wheel_link">
<material>Gazebo/Yellow</material>
</gazebo>
<!-- front_caster_link -->
<joint name="base_link_to_front_caster_link_1_joint" type="continuous">
<origin xyz="${base_link_x/2-caster_link_radius} 0 ${base_link_z/2*-1}"
rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="front_caster_link_1"/>
</joint>
<link name="front_caster_link_1" >
<visual>
<geometry>
<sphere radius="${caster_link_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow" />
</visual>
<collision>
<geometry>
<sphere radius="${caster_link_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<inertial>
<mass value="${caster_link_mass}" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="${2*caster_link_mass*caster_link_radius*caster_link_radius/5}" ixy = "0" ixz = "0"
iyy="${2*caster_link_mass*caster_link_radius*caster_link_radius/5}" iyz = "0"
izz="${2*caster_link_mass*caster_link_radius*caster_link_radius/5}" />
</inertial>
</link>
<gazebo reference="front_caster_link_1">
<material>Gazebo/Yellow</material>
</gazebo>
<!-- back_caster_link -->
<joint name="base_link_to_back_caster_link_1_joint" type="continuous">
<origin xyz="${-base_link_x/2+caster_link_radius} 0 ${base_link_z/2*-1}"
rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="back_caster_link_1"/>
</joint>
<link name="back_caster_link_1" >
<visual>
<geometry>
<sphere radius="${caster_link_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow" />
</visual>
<collision>
<geometry>
<sphere radius="${caster_link_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<inertial>
<mass value="${caster_link_mass}" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="${2*caster_link_mass*caster_link_radius*caster_link_radius/5}" ixy = "0" ixz = "0"
iyy="${2*caster_link_mass*caster_link_radius*caster_link_radius/5}" iyz = "0"
izz="${2*caster_link_mass*caster_link_radius*caster_link_radius/5}" />
</inertial>
</link>
<gazebo reference="back_caster_link_1">
<material>Gazebo/Yellow</material>
</gazebo>
<!-- Plug -in -->
<!-- JOINT PUBLISHER -->
<gazebo>
<plugin name="amr_joint_state" filename="libgazebo_ros_joint_state_publisher.so">
<ros>
<remapping>~/out:=joint_states</remapping>
</ros>
<update_rate>30</update_rate>
<joint_name>base_link_to_left_wheel_link_joint</joint_name>
<joint_name>base_link_to_right_wheel_link_joint</joint_name>
<joint_name>base_link_to_front_caster_link_1_joint</joint_name>
<!-- <joint_name>front_caster_link_1_to_front_caster_link_2_joint</joint_name>
<joint_name>front_caster_link_2_to_front_caster_link_3_joint</joint_name> -->
<joint_name>base_link_to_back_caster_link_1_joint</joint_name>
<!-- <joint_name>rear_caster_link_1_to_rear_caster_link_2_joint</joint_name>
<joint_name>rear_caster_link_2_to_rear_caster_link_3_joint</joint_name> -->
</plugin>
</gazebo>
<!-- Differential drive -->
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<!-- wheels -->
<left_joint>base_link_to_left_wheel_link_joint</left_joint>
<right_joint>base_link_to_right_wheel_link_joint</right_joint>
<!-- kinematics -->
<wheel_separation>1</wheel_separation>
<wheel_diameter>0.4</wheel_diameter>
<!-- limits -->
<max_wheel_torque>5</max_wheel_torque>
<max_wheel_acceleration>2.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
</gazebo>
<!-- Lidar Sensor -->
<joint name="base_link_to_laser_scan_link_joint" type="fixed">
<origin xyz="0 0 ${base_link_z/2+laser_scan_link_z/2}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="laser_scan_link"/>
</joint>
<link name="laser_scan_link" >
<visual>
<geometry>
<box size="${laser_scan_link_x} ${laser_scan_link_y} ${laser_scan_link_z}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red" />
</visual>
<collision>
<geometry>
<box size="${laser_scan_link_x} ${laser_scan_link_y} ${laser_scan_link_z}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<inertial>
<mass value="${laser_scan_link_mass}" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="${laser_scan_link_mass*(laser_scan_link_y*laser_scan_link_y+laser_scan_link_z*laser_scan_link_z)/12}" ixy = "0" ixz = "0"
iyy="${laser_scan_link_mass*(laser_scan_link_x*laser_scan_link_x+laser_scan_link_z*laser_scan_link_z)/12}" iyz = "0"
izz="${laser_scan_link_mass*(laser_scan_link_x*laser_scan_link_x+laser_scan_link_z*laser_scan_link_z)/12}" />
</inertial>
</link>
<gazebo reference="laser_scan_link">
<material>Gazebo/Red</material>
</gazebo>
<joint name="laser_scan_link_to_laser_scan_frame_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 0"/>
<parent link="laser_scan_link"/>
<child link="laser_scan_frame"/>
</joint>
<link name="laser_scan_frame" >
</link>
<gazebo reference="laser_scan_frame">
<sensor name="sensor_ray" type="ray">
<pose>0 0 0 0 0 0 </pose>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.0</resolution>
<min_angle>-3.14</min_angle>
<max_angle>3.14</max_angle>
</horizontal>
</scan>
<range>
<min>0.1</min>
<max>25.0</max>
</range>
</ray>
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>100.0</update_rate>
<plugin name="laser" filename="libgazebo_ros_ray_sensor.so">
<ros>
<namespace>/box_bot</namespace>
<remapping>~/out:=laser_scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>laser_scan_frame</frame_name>
</plugin>
</sensor>
</gazebo>
Hi,
Havinga look at the course, the environment that you are showing doent corespond to teh notebook of unit6, you shoudl hav eteh box bot nside a room.
Also, could post images a bit bigger because it’s very difficult to read at that resolution.
At a glance, the URDF you provided seems ok, but haven’t tested it. Can you launch teh simulation with verbose and see if there are some error indicated by gazebo? Fixed joints shouldnt have issues.
1 Like
Hi,
Thanks for helping. I found out the problem.
The laser frame origin is as same as the laser link. But the laser link has collision, so the laser ray can not go outside the laser link
I moved the laser frame higher than the laser geometry. It works well. Very realistic ^^
Thanks
system
June 16, 2024, 7:38am
5
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.