<?xml version="1.0"?>
<robot name="mira">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="red">
<color rgba="0.8 0 0 1"/>
</material>
<material name="green">
<color rgba="0 0.8 0 1"/>
</material>
<material name="grey">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="white">
<color rgba="1.0 1.0 1.0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
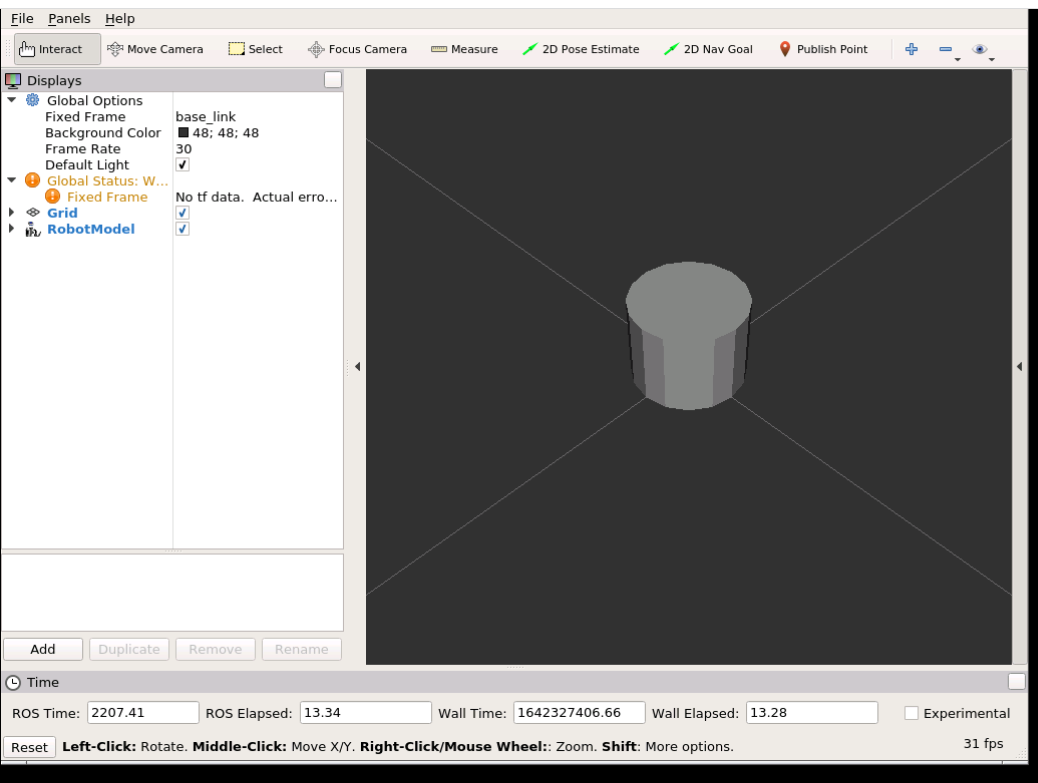
<link name = "base_link">
<visual>
<origin xyz="0 0 0.045" rpy="0 0 0"/>
<geometry>
<cylinder radius = "0.06" length ="0.09"/>
</geometry>
<material name="grey">
</visual>
</link>
<link name = "roll_M1_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius = "0.06" length ="0.09"/>
</geometry>
<material name="red">
</visual>
</link>
<link name = "pitch_M2_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius = "0.01" length ="0.005"/>
<material name="green">
</geometry>
</visual>
</link>
<link name = "yaw_M3_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius = "0.01" length ="0.005"/>
<material name="blue">
</geometry>
</visual>
</link>
<link name = "head_link">
<visual>
<origin xyz="0 0 0.12" rpy="0 0 0"/>
<geometry>
<sphere radius = "0.06"/>
</geometry>
<material name="white">
</visual>
</link>
<link name = "left_eye_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius = "0.00525" length = "0.00525"/>
</geometry>
<material name="black">
</visual>
</link>
<link name = "right_eye_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius = "0.00525" length = "0.00525"/>
</geometry>
<material name="black">
</visual>
</link>
<link name = "camera_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size = "0.0005 0.0005 0.0005"/>
</geometry>
</visual>
</link>
<joint name="roll_joint" type="revolute">
<parent link="base_link"/>
<child link="roll_M1_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" />
<axis xyz="1 0 0"/>
</joint>
<joint name="pitch_joint" type="revolute">
<parent link="roll_M1_link"/>
<child link="pitch_M2_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" />
<axis xyz="1 0 0"/>
</joint>
<joint name="yaw_joint" type="revolute">
<parent link="pitch_M2_link"/>
<child link="yaw_M3_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" />
<axis xyz="1 0 0"/>
</joint>
<joint name="base_head_joint" type="revolute">
<parent link="yaw_M3_link "/>
<child link="head_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" />
<axis xyz="1 0 0"/>
</joint>
<joint name="head_righteye_joint" type="fixed">
<parent link="head_link "/>
<child link="right_eye_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<axis xyz="1 0 0"/>
</joint>
<joint name="head_lefteye_joint" type="fixed">
<parent link="head_link"/>
<child link="left_eye_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<axis xyz="1 0 0"/>
</joint>
<joint name="head_camera_joint" type="fixed">
<parent link="head_link "/>
<child link="camera_link"/>
<origin xyz="0.0023 0 -0.0005" rpy="0 0 0"/>
<axis xyz="1 0 0"/>
</joint>
</robot>
when the i launch only the base_link that
appears