Hello,
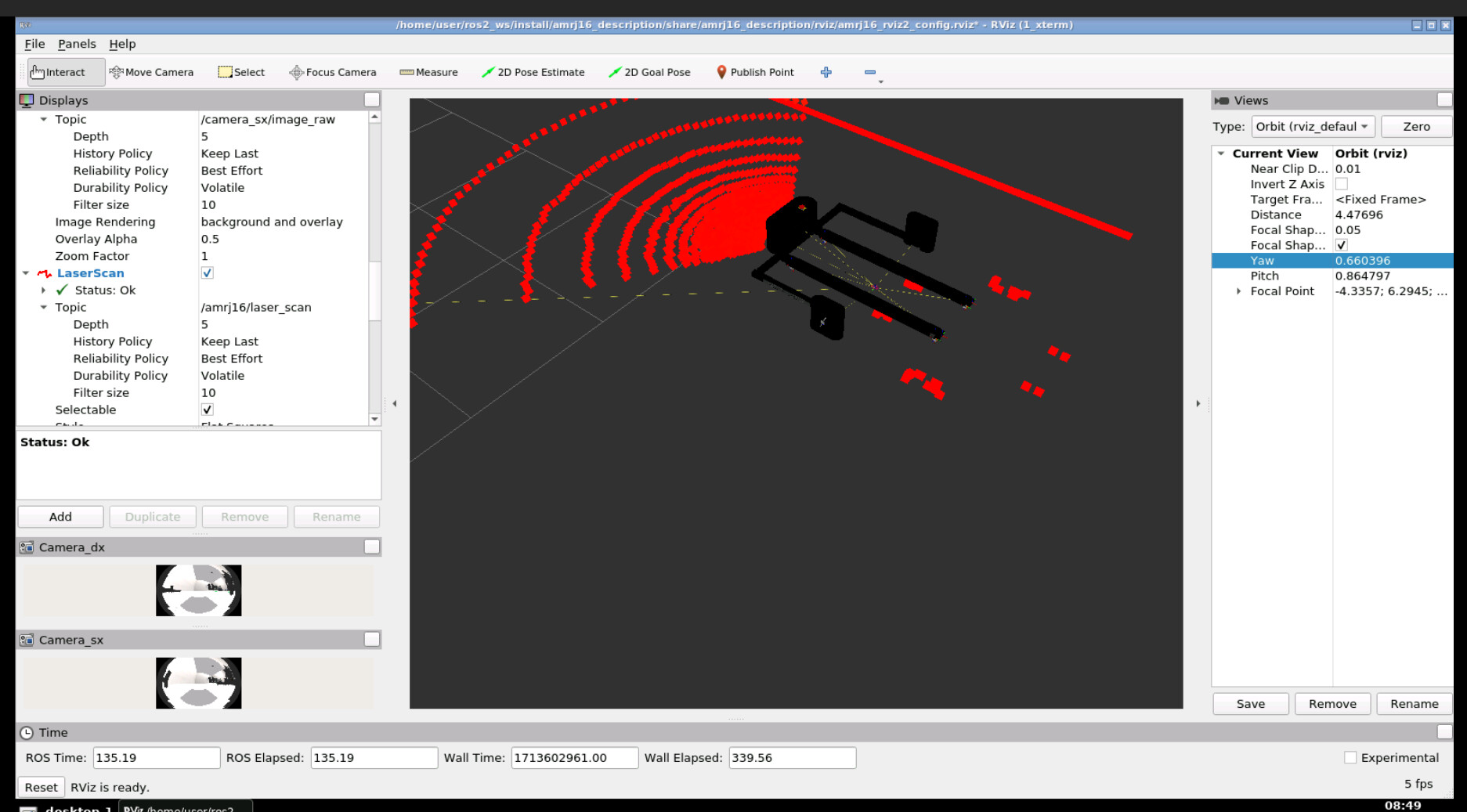
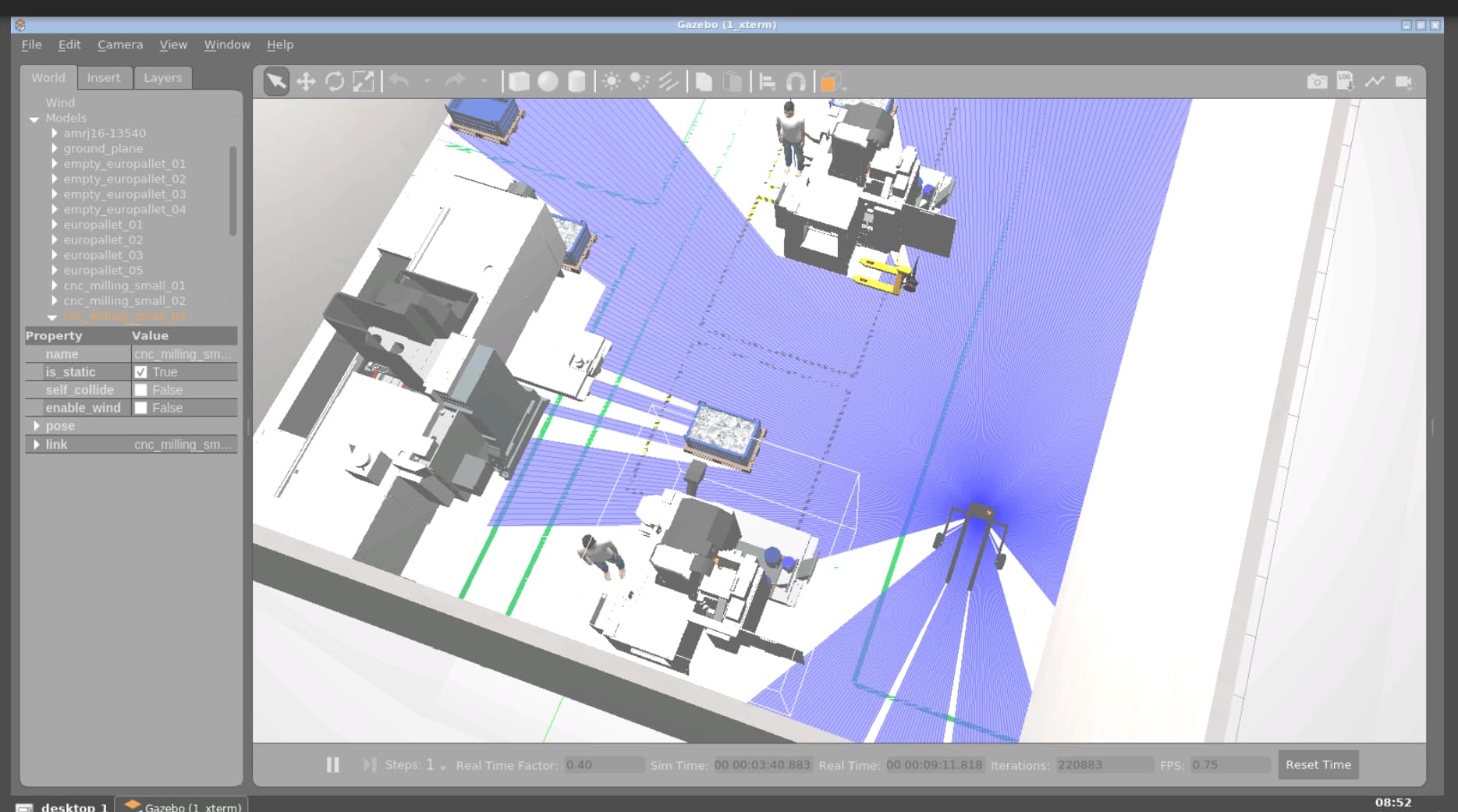
I have installed the lidar sensor which works but there is something wrong with its transformation , as you can see in the first image in which the robot footprint has an offset. In the gazebo simulator, the lidar appears to be in the right position and the static trasformations work, third image. Please, can anyone give me some suggestion?
thanks
Salvatore