I have a few questions on the plugin provided in wiki ros. I hope if someone could try to take some time out and explain them briefly. Thank you
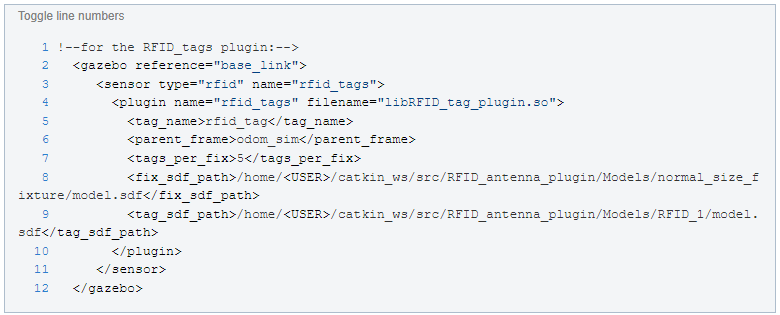
For the above picture:
- Gazebo reference says “base_link”. Since its a plugin for tags, why and what exactly is base_link here? How are the tags distributed in the gazebo world?
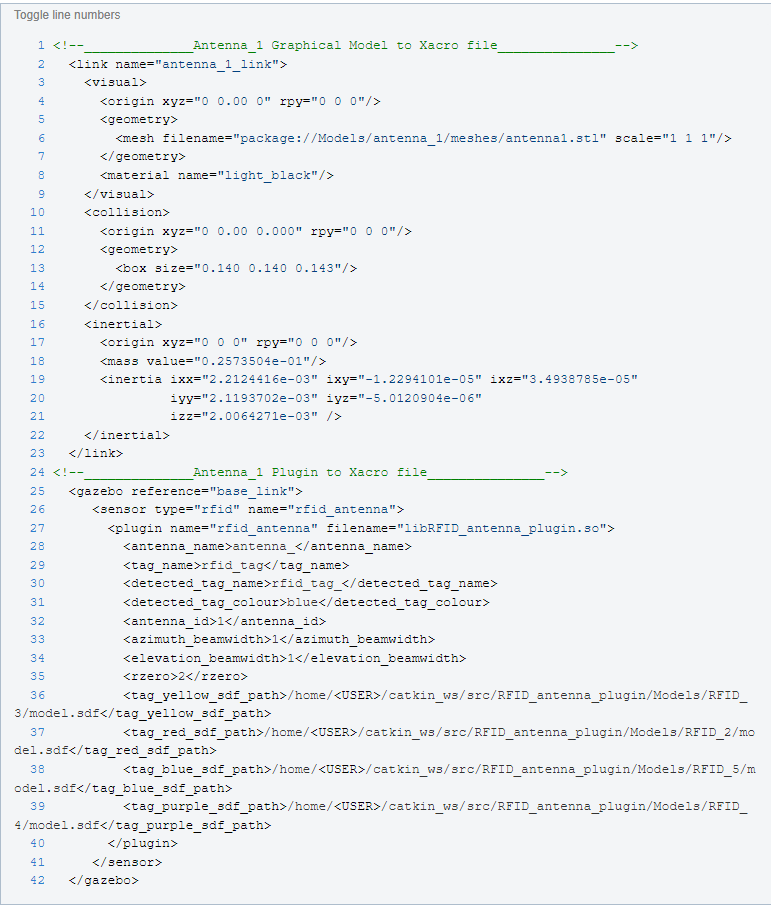
For the second picture:
- This would a plugin for the antenna, wouldnt the gazebo reference be the same as the link name “antenna_1_link” ?