I am using my system to simulate(22.04 & Humble) a turtlebot3 and a teleop twist keyboard.
This system publishes camera topics to be used by container 1.
2 docker containers.
Container 1: runs ORB SLAM3(18.04 & Melodic)
I’ve tried to install ROS2 in this container so I can just run the bridge straight away but since it’s running 18.04 I have been unable to install ros 2
Container 2&3:
runs ros 1 bridge(foxy & noetic) & master
taken from https://github.com/DominikN/ros-bridge-docker-demo/tree/main
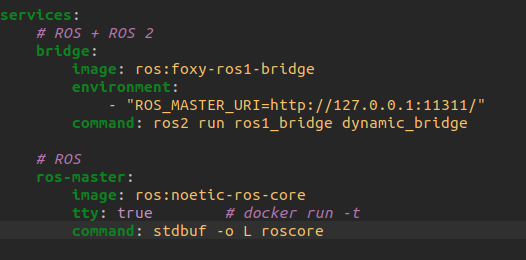
Although when running ROSCORE in Container 1 it acts as the master node and gives the ip 127.0.0.1 without running the master node container in container 2&3 I will get the error that there is no master, which is why I am running 2 ROS1 masters.
Issue
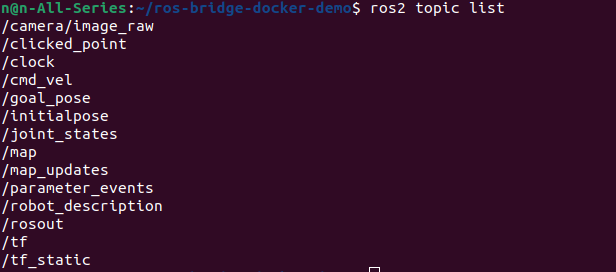
When running rostopic list in container 1, no topics publsihed from the system are received

I have implemented this method because I’d like to use ROS2 Humble for whatever I am able to and add in a docker containers which contain 1 of several visual SLAM algorithms I’d like to use since they are all written for various distros and ubuntu versions