I’d like to share my issue to get a better understanding of what’s happening. I’ll be as descriptive as possible.
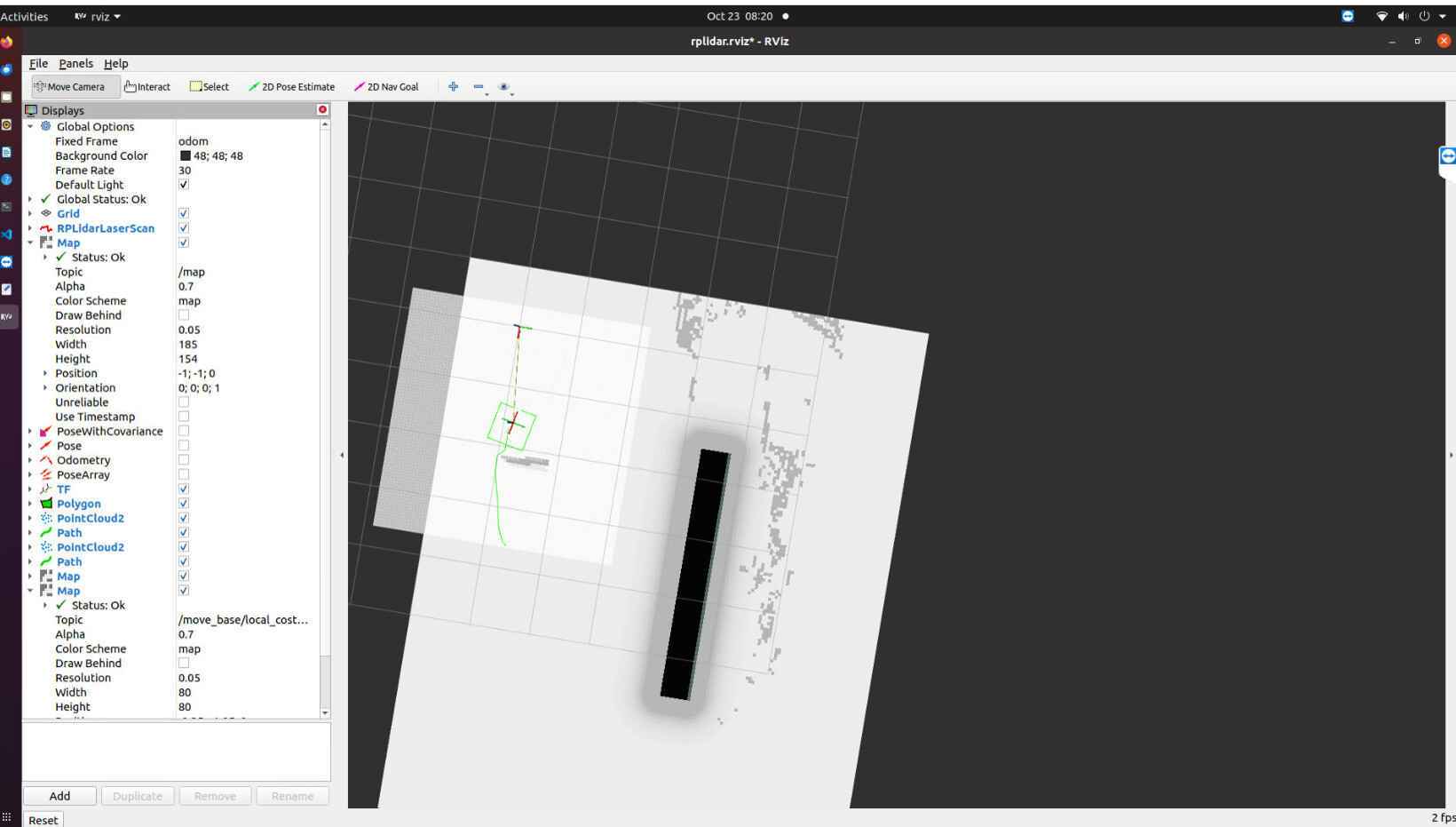
Here’s the situation: I have a mobile robot that uses ROS 1 and is equipped with a lidar (rplidar A1). The robot’s goal is to avoid obstacles on a predefined map as well as dynamically detected obstacles (moving obstacles) using the lidar. The robot successfully avoids the predefined obstacles on the map, but I’m encountering issues with dynamic obstacle avoidance. My robot is creating a path to avoid the obstacle but ic very close to it, so it cannot avoid it, and is doing back and forward movements withou any succesful result. I tried to increase the inflation_radius, I changed aso some other parameters but is like they do not affect the creation of the path. You can see the picture below about the path that is created.
I’m sharing my global and local YAML files, along with the launch files related to the navigation system, for your reference.
local costmap
local_costmap:
global_frame: odom # 09/25 it was odom
robot_base_frame: base_link
update_frequency: 5.0 # 10 /5.0
publish_frequency: 5.0 #10
#transform_tolerance: 0.5
width: 4.0
height: 4.0
resolution: 0.05
static_map: false
rolling_window: true
footprint: [[0.3, 0.3], [0.3, -0.3], [-0.3, -0.3], [-0.3, 0.3]] # 11/07/2024
obstacle_range: 5 #2.5 0.5 before was 1 (09/30) it was 3 and changed to 5 on 10/11/2024
raytrace_range: 5 #3.0 0.8 before was 2 (09/30) it was 3 and changed to 5 on 10/11/2024
plugins:
#- {name: static_layer, type: "costmap_2d::StaticLayer"} εγινε σχολιο 09/24/24
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
static_layer: # I did comment 11/09/2024 (maybe net time do not have it as a comment) 09/11/2024 we were able as it is to see the obstacle in real time of the agv. not the obstacle that we already had
enabled: true
map_topic: map # was /map 10/11/2024
#09/13/1024 το βγαλα απο σχολιο το στατικ λειερ
inflation_layer:
enabled: true
cost_scaling_factor: 10 # it was 5 10/11/2024
inflation_radius: 1.5 #it was 0.5 10/11/2024
obstacle_layer:
enabled: true #11/09/2024 false
observation_sources: laser_scan_sensor
footprint_clearing_enabled: true
laser_scan_sensor: {data_type: LaserScan, sensor_frame: laser, clearing: true, marking: true, topic: LaserScan}
common costmap
#map_type: costmap
obstacle_range: 5 #it was 3 and changed to 5 on 10/11/2024
raytrace_range: 5 #it was 3 and changed to 5 on 10/11/2024
#transform_tolerance: 0.2
footprint: [[0.3, 0.3], [0.3, -0.3], [-0.3, -0.3], [-0.3, 0.3]]
#robot_radius: 0.0
inflation_radius: 1.5 #it was 0.5 10/11/2024
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: laser_frame, data_type: LaserScan, topic: scan, marking: true, clearing: true}
global costmap
global_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 5.0
#transform_tolerance: 0.5 14/06 change
static_map: true
DWA planner
DWAPlannerROS:
max_vel_x: 0.22
min_vel_x: -0.22
max_vel_y: 0.0
min_vel_y: 0.0
max_vel_trans: 0.22
min_vel_trans: 0.11
max_vel_theta: 2.75
min_vel_theta: 1.37
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
xy_goal_tolerance: 0.05
yaw_goal_tolerance: 0.17
latch_xy_goal_tolerance: false
sim_time: 1.5
vx_samples: 20
vy_samples: 0
vth_samples: 40
controller_frequency: 10.0
path_distance_bias: 32.0
goal_distance_bias: 20.0
occdist_scale: 0.02
forward_point_distance: 0.325
stop_time_buffer: 0.2
scaling_speed: 0.25
max_scaling_factor: 0.2
oscillation_reset_dist: 0.05
publish_traj_pc: true
publish_cost_grid_pc: true
AMCL launch
<launch>
<!-- Load the map -->
<!-- <arg name="map_file" default="/home/ubuntu/psybot_ws/testst1.yaml"/> -->
<!-- Run AMCL -->
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<param name="odom_frame_id" value="odom"/>
<param name="base_frame_id" value="base_link"/>
<param name="global_frame_id" value="map"/>
<param name="min_particles" value="100"/>
<param name="max_particles" value="2000"/>
<param name="initial_pose_x" value="0.0"/>
<param name="initial_pose_y" value="0.0"/>
<param name="initial_pose_a" value="0.0"/>
<param name="laser_min_range" value="-1.0"/>
<param name="laser_max_range" value="0.5"/> <!-- change from 2 to 0.5 07/02/2024 -->
<param name="laser_max_beams" value="30"/>
<param name="gui_publish_rate" value="10.0"/>
<!-- 02/07/2024, these parameters are used to decrease the influence of the lidar. -->
<param name="laser_z_hit" value="0.05"/>
<param name="laser_z_rand" value="0.95"/>
<param name="laser_sigma_hit" value="1.0"/>
<!-- Remap the laser topic -->
</node>
<!-- Transform broadcaster for the static transform between map and odom if needed -->
<!-- You might need to adjust or remove this depending on your setup -->
<node pkg="tf" type="static_transform_publisher" name="odom_to_map_broadcaster"
args="0 0 0 0 0 0 1 map odom 100"/>
</launch>
MoveBase Launch
<?xml version="1.0"?>
<launch>
<!-- Run the map server -->
<!-- <arg name="map_file" default="/home/ubuntu/psybot_ws/testst1.yaml"/> -->
<!-- <arg name="move_forward_only" default="true"/> -->
<!-- <node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" /> -->
<!-- <arg name="no_static_map" default="false"/> -->
<arg name="base_global_planner" default="navfn/NavfnROS"/>
<arg name="base_local_planner" default="dwa_local_planner/DWAPlannerROS"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<param name="base_global_planner" value="$(arg base_global_planner)"/>
<param name="base_local_planner" value="$(arg base_local_planner)"/>
<param name="recovery_behavior_enabled" value="true"/>
<param name="controller_frequency" value="1.0"/>
<rosparam file="/home/ubuntu/psybot_ws/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="/home/ubuntu/psybot_ws/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="/home/ubuntu/psybot_ws/local_costmap_params.yaml" command="load" />
<rosparam file="/home/ubuntu/psybot_ws/global_costmap_params.yaml" command="load" />
<!-- Load DWA Local Planner parameters -->
<rosparam file="/home/ubuntu/psybot_ws/dwa_local_planner_params.yaml" command="load" />
</node>
</launch>