Hi Construct-Team,
i have a problem with the ros2 teleop_keyboard in the gazebo simulation. I cant teleoperate the turtlebot3, i followed the construction in Part 1.
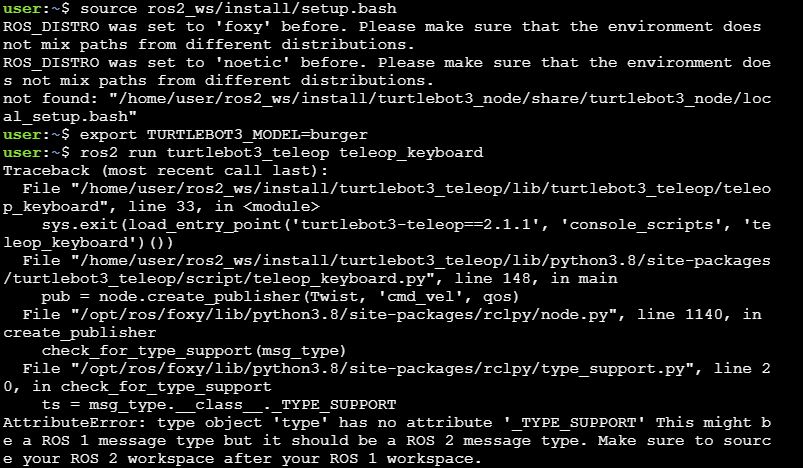
Here are the shell output:
Hi Construct-Team,
i have a problem with the ros2 teleop_keyboard in the gazebo simulation. I cant teleoperate the turtlebot3, i followed the construction in Part 1.
Here are the shell output:
Hi @mosgaed ,
Welcome to this Community!
To run Teleop for TurtleBot3 in ROS2 rosject, you must use the following commands:
cd ~
source /opt/ros/noetic/setup.bash
source ~/simulation_ws/devel/setup.bash
rosrun turtlebot3_teleop turtlebot3_teleop_key
Let me know if this worked for you!
Regards,
Girish
Thank you this works!
This topic was automatically closed 10 days after the last reply. New replies are no longer allowed.