Hello,
I am working on a project to simulate a robotic arm picking up an object with ROS2 control framework that I learned through the ROS2 Control framework course of the Construct community. I was successful in moving the robotic arm and the gripper to close an object. When it came to the point of engaging with the object; The object would slip off the object. I tried increasing the mu1 and mu2 values of the object to allow it to stick since most documentation I found online would work theoretically.
I wanted to hear your insight on what parameters I can fine tune or a ros_gazebo package I should look into the fix my dilemma. I would like advice on what I can try to work with. I am using ROS2 Humble on my current machine. I will also share the main codes used for my project: xacro/urdf files, world, how I ran it and how it simulated; I appreciate any help or direction to advance forward.
I was worried I did it wrong so I used the information on the Moveit2 course and took inspiration of the grasp_box urdf file if it would work with urdf only or sdf would not be enough.
Controllers Yaml file: mycobot_280_controllers.yaml
# controller_manager provides the necessary infrastructure to manage multiple controllers efficiently and robustly using ROS 2 Control.
controller_manager:
ros__parameters:
update_rate: 10 # update_rate specifies how often (in Hz) the controllers should be updated.
# The JointTrajectoryController allows you to send joint trajectory commands to a group
# of joints on a robot. These commands specify the desired positions for each joint.
arm_controller:
type: joint_trajectory_controller/JointTrajectoryController
grip_controller:
type: joint_trajectory_controller/JointTrajectoryController
# Responsible for publishing the current state of the robot's joints to the /joint_states
# ROS 2 topic
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
# Define the parameters for each controller
arm_controller:
ros__parameters:
joints:
- link1_to_link2
- link2_to_link3
- link3_to_link4
- link4_to_link5
- link5_to_link6
- link6_to_link6flange
# The controller will expect position commands as input for each of these joints.
command_interfaces:
- position
# Tells the controller that it should expect to receive position data as the state
# feedback from the hardware interface,
state_interfaces:
- position
# If true, When set to true, the controller will not use any feedback from the system
# (e.g., joint positions, velocities, efforts) to compute the control commands.
open_loop_control: true
# When set to true, it allows the controller to integrate the trajectory goals it receives.
# This means that if the goal trajectory only specifies positions, the controller will
# numerically integrate the positions to compute the velocities and accelerations required
# to follow the trajectory.
allow_integration_in_goal_trajectories: true
grip_controller:
ros__parameters:
joints:
- gripper_controller
command_interfaces:
- position
state_interfaces:
- position
open_loop_control: true
allow_integration_in_goal_trajectories: true
URDF File: mycobot_280.urdf.xacro
<?xml version="1.0" ?>
<robot xmlns:xacro="http://wiki.ros.org/xacro" name="mycobot_280">
<xacro:include filename="$(find mycobot_gazebo)/urdf/ros2_control/classic_gazebo/mycobot_280_classic_gazebo.xacro"/>
<xacro:include filename="$(find mycobot_gazebo)/urdf/ros2_control/classic_gazebo/mycobot_280_ros2_control.xacro"/>
<link name="world"/>
<xacro:property name="effort" value="5.0"/>
<xacro:property name="velocity" value="2.792527"/>
<xacro:macro name="default_transmission" params="joint_name">
<transmission name="transmission_${joint_name}">
<plugin>transmission_interface/SimpleTransmission</plugin>
<actuator name="actuator_${joint_name}" role="actuator_${joint_name}"/>
<joint name="${joint_name}" role="${joint_name}">
<mechanical_reduction>1.0</mechanical_reduction>
</joint>
</transmission>
</xacro:macro>
<link name="base_link">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.33"/>
<inertia
ixx="0.000784" ixy="0.0" ixz="0.0"
iyy="0.000867" iyz="0.0"
izz="0.001598"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/base_link.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.03" rpy = "0 0 ${pi/2}"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/base_link.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.03" rpy = "0 0 ${pi/2}"/>
</collision>
</link>
<link name="link1">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.12"/>
<inertia
ixx="0.000148" ixy="0.0" ixz="0.0"
iyy="0.000148" iyz="0.0"
izz="0.000096"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link1.dae"/>
</geometry>
<origin xyz = "0.0 0 0 " rpy = " 0 0 ${-pi/2}"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link1.dae"/>
</geometry>
<origin xyz = "0.0 0 0.0 " rpy = " 0 0 ${-pi/2}"/>
</collision>
</link>
<link name="link2">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.19"/>
<inertia
ixx="0.000148" ixy="0.0" ixz="0.0"
iyy="0.000148" iyz="0.0"
izz="0.000096"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link2.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.06096" rpy = " 0 0 ${-pi/2}"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link2.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.06096" rpy = " 0 0 ${-pi/2}"/>
</collision>
</link>
<link name="link3">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.16"/>
<inertia
ixx="0.000148" ixy="0.0" ixz="0.0"
iyy="0.000148" iyz="0.0"
izz="0.000096"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link3.dae"/>
</geometry>
<origin xyz = "0.0 0 0.03256 " rpy = " 0 ${-pi/2} 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link3.dae"/>
</geometry>
<origin xyz = "0.00 0 0.03256 " rpy = " 0 ${-pi/2} 0"/>
</collision>
</link>
<link name="link4">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.124"/>
<inertia
ixx="0.000103" ixy="0.0" ixz="0.0"
iyy="0.000103" iyz="0.0"
izz="0.000096"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link4.dae"/>
</geometry>
<origin xyz = "0.0 0 0.03056 " rpy = " 0 ${-pi/2} 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link4.dae"/>
</geometry>
<origin xyz = "0.0 0 0.03056 " rpy = " 0 ${-pi/2} 0"/>
</collision>
</link>
<link name="link5">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.11"/>
<inertia
ixx="0.000103" ixy="0.0" ixz="0.0"
iyy="0.000103" iyz="0.0"
izz="0.000096"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link5.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.03356 " rpy = "${-pi/2} 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link5.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.03356 " rpy = "${-pi/2} 0 0"/>
</collision>
</link>
<link name="link6">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.0739"/>
<inertia
ixx="0.00006649" ixy="0.0" ixz="0.0"
iyy="0.00006649" iyz="0.0"
izz="0.000096"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link6.dae"/>
</geometry>
<origin xyz = "0 0.00 -0.038" rpy = "0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link6.dae"/>
</geometry>
<origin xyz = "0 0.00 -0.038" rpy = "0 0 0"/>
</collision>
</link>
<link name="link6_flange">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.035"/>
<inertia
ixx="0.0000149" ixy="0.0" ixz="0.0"
iyy="0.0000149" iyz="0.0"
izz="0.0000196"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link7.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.012 " rpy = "0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/link7.dae"/>
</geometry>
<origin xyz = "0.0 0 -0.012 " rpy = "0 0 0"/>
</collision>
</link>
<link name="gripper_base">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.07"/>
<inertia
ixx="0.000010725" ixy="0.0" ixz="0.0"
iyy="0.000014392" iyz="0.0"
izz="0.000018517"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_base.dae"/>
</geometry>
<origin xyz = "0.0 0.0 -0.012" rpy = "0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_base.dae"/>
</geometry>
<origin xyz = "0.0 0.0 -0.012" rpy = "0 0 0"/>
</collision>
</link>
<link name="gripper_left1">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.007"/>
<inertia
ixx="1e-6" ixy="0.0" ixz="0.0"
iyy="1e-6" iyz="0.0"
izz="1e-6"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_left1.dae"/>
</geometry>
<origin xyz = "0.039 -0.0133 -0.012 " rpy = " 0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_left1.dae"/>
</geometry>
<origin xyz = "0.039 -0.0133 -0.012 " rpy = " 0 0 0"/>
</collision>
</link>
<link name="gripper_left2">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.007"/>
<inertia
ixx="1e-6" ixy="0.0" ixz="0.0"
iyy="1e-6" iyz="0.0"
izz="1e-6"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_left2.dae"/>
</geometry>
<origin xyz = "0.005 -0.0195 -0.012 " rpy = " 0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_left2.dae"/>
</geometry>
<origin xyz = "0.005 -0.0195 -0.012 " rpy = " 0 0 0"/>
</collision>
</link>
<link name="gripper_left3">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.007"/>
<inertia
ixx="1e-6" ixy="0.0" ixz="0.0"
iyy="1e-6" iyz="0.0"
izz="1e-6"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_left3.dae"/>
</geometry>
<origin xyz = "0.012 0.0025 -0.012 " rpy = " 0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_left3.dae"/>
</geometry>
<origin xyz = "0.012 0.0025 -0.012" rpy = " 0 0 0"/>
</collision>
</link>
<link name="gripper_right1">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.007"/>
<inertia
ixx="1e-6" ixy="0.0" ixz="0.0"
iyy="1e-6" iyz="0.0"
izz="1e-6"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_right1.dae"/>
</geometry>
<origin xyz = "-0.039 -0.0133 -0.012 " rpy = " 0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_right1.dae"/>
</geometry>
<origin xyz = "-0.039 -0.0133 -0.012 " rpy = " 0 0 0"/>
</collision>
</link>
<link name="gripper_right2">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.007"/>
<inertia
ixx="1e-6" ixy="0.0" ixz="0.0"
iyy="1e-6" iyz="0.0"
izz="1e-6"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_right2.dae"/>
</geometry>
<origin xyz = "-0.005 -0.0195 -0.012 " rpy = " 0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_right2.dae"/>
</geometry>
<origin xyz = "-0.005 -0.0195 -0.012 " rpy = " 0 0 0"/>
</collision>
</link>
<link name="gripper_right3">
<inertial>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<mass value="0.007"/>
<inertia
ixx="1e-6" ixy="0.0" ixz="0.0"
iyy="1e-6" iyz="0.0"
izz="1e-6"/>
</inertial>
<visual>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_right3.dae"/>
</geometry>
<origin xyz = "-0.012 0.0025 -0.012 " rpy = " 0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="file://$(find mycobot_description)/meshes/mycobot_280/gripper_right3.dae"/>
</geometry>
<origin xyz = "-0.012 0.0025 -0.012" rpy = " 0 0 0"/>
</collision>
</link>
<gazebo reference="base_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="link1">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link2">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link3">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link4">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link5">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link6">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="link6_flange">
<material>Gazebo/White</material>
</gazebo>
<gazebo reference="gripper_base">
<material>Gazebo/White</material>
</gazebo>
<joint name="virtual_joint" type="fixed">
<parent link="world"/>
<child link="base_link"/>
<origin xyz= "0 0 0" rpy = "0 0 0"/>
</joint>
<joint name="base_link_to_link1" type="fixed">
<parent link="base_link"/>
<child link="link1"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<joint name="link1_to_link2" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-2.879793" upper = "2.879793" velocity = "${velocity}"/>
<parent link="link1"/>
<child link="link2"/>
<origin xyz= "0 0 0.13156" rpy = "0 0 ${pi/2}"/>
<dynamics damping="12.0" friction="6.0"/>
</joint>
<joint name="link2_to_link3" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-2.879793" upper = "2.879793" velocity = "${velocity}"/>
<parent link="link2"/>
<child link="link3"/>
<origin xyz= "0 0 -0.001" rpy = "0 ${pi/2} ${-pi/2}"/>
<dynamics damping="12.0" friction="6.0"/>
</joint>
<joint name="link3_to_link4" type="revolute">
<axis xyz=" 0 0 1"/>
<limit effort = "${effort}" lower = "-2.879793" upper = "2.879793" velocity = "${velocity}"/>
<parent link="link3"/>
<child link="link4"/>
<origin xyz= "-0.1104 0 0 " rpy = "0 0 0"/>
<dynamics damping="12.0" friction="6.0"/>
</joint>
<joint name="link4_to_link5" type="revolute">
<axis xyz=" 0 0 1"/>
<limit effort = "${effort}" lower = "-2.879793" upper = "2.879793" velocity = "${velocity}"/>
<parent link="link4"/>
<child link="link5"/>
<origin xyz= "-0.096 0 0.06062" rpy = "0 0 ${-pi/2}"/>
<dynamics damping="12.0" friction="6.0"/>
</joint>
<joint name="link5_to_link6" type="revolute">
<axis xyz=" 0 0 1"/>
<limit effort = "${effort}" lower = "-2.879793" upper = "2.879793" velocity = "${velocity}"/>
<parent link="link5"/>
<child link="link6"/>
<origin xyz= "0 -0.07318 0" rpy = "${pi/2} ${-pi/2} 0"/>
<dynamics damping="7.0" friction="4.0"/>
</joint>
<joint name="link6_to_link6flange" type="revolute">
<axis xyz=" 0 0 1"/>
<limit effort = "${effort}" lower = "-3.05" upper = "3.05" velocity = "${velocity}"/>
<parent link="link6"/>
<child link="link6_flange"/>
<origin xyz= "0 0.0456 0" rpy = "${-pi/2} 0 0"/>
<dynamics damping="3.0" friction="3.0"/>
</joint>
<joint name="link6flange_to_gripper_base" type="fixed">
<parent link="link6_flange"/>
<child link="gripper_base"/>
<origin xyz= "0 0 0.034" rpy = "1.579 0 0"/>
</joint>
<joint name="gripper_controller" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-0.7" upper = "0.15" velocity = "${velocity}"/>
<parent link="gripper_base"/>
<child link="gripper_left3"/>
<origin xyz= "-0.012 0.005 0" rpy = "0 0 0"/>
<dynamics damping="2.0" friction="4.0"/>
</joint>
<joint name="gripper_base_to_gripper_left2" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-0.8" upper = "0.5" velocity = "${velocity}"/>
<parent link="gripper_base"/>
<child link="gripper_left2"/>
<origin xyz= "-0.005 0.027 0" rpy = "0 0 0"/>
<mimic joint="gripper_controller" multiplier="1.0" offset="0" />
<dynamics damping="2.0" friction="4.0"/>
</joint>
<joint name="gripper_left3_to_gripper_left1" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-0.5" upper = "0.5" velocity = "${velocity}"/>
<parent link="gripper_left3"/>
<child link="gripper_left1"/>
<origin xyz= "-0.027 0.016 0" rpy = "0 0 0"/>
<mimic joint="gripper_controller" multiplier="-1.0" offset="0" />
<dynamics damping="2.0" friction="4.0"/>
</joint>
<joint name="gripper_base_to_gripper_right3" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-0.15" upper = "0.7" velocity = "${velocity}"/>
<parent link="gripper_base"/>
<child link="gripper_right3"/>
<origin xyz= "0.012 0.005 0" rpy = "0 0 0"/>
<mimic joint="gripper_controller" multiplier="-1.0" offset="0" />
<dynamics damping="2.0" friction="4.0"/>
</joint>
<joint name="gripper_base_to_gripper_right2" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-0.5" upper = "0.8" velocity = "${velocity}"/>
<parent link="gripper_base"/>
<child link="gripper_right2"/>
<origin xyz= "0.005 0.027 0" rpy = "0 0 0"/>
<mimic joint="gripper_controller" multiplier="-1.0" offset="0" />
<dynamics damping="2.0" friction="4.0"/>
</joint>
<joint name="gripper_right3_to_gripper_right1" type="revolute">
<axis xyz="0 0 1"/>
<limit effort = "${effort}" lower = "-0.5" upper = "0.5" velocity = "${velocity}"/>
<parent link="gripper_right3"/>
<child link="gripper_right1"/>
<origin xyz= "0.027 0.016 0" rpy = "0 0 0"/>
<mimic joint="gripper_controller" multiplier="1.0" offset="0" />
<dynamics damping="2.0" friction="4.0"/>
</joint>
<xacro:default_transmission joint_name="link1_to_link2"/>
<xacro:default_transmission joint_name="link2_to_link3"/>
<xacro:default_transmission joint_name="link3_to_link4"/>
<xacro:default_transmission joint_name="link4_to_link5"/>
<xacro:default_transmission joint_name="link5_to_link6"/>
<xacro:default_transmission joint_name="link6_to_link6flange"/>
<xacro:default_transmission joint_name="gripper_controller"/>
</robot>
URDF file: mycobot_280_classic_gazebo.xacro
<?xml version="1.0" ?>
<robot xmlns:xacro="http://wiki.ros.org/xacro" name="mycobot_280">
<!-- The Gazebo plugin for ros2_control -->
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<robot_param>robot_description</robot_param>
<robot_param_node>robot_state_publisher</robot_param_node>
<parameters>$(find mycobot_gazebo)/config/mycobot_280_controllers.yaml</parameters>
</plugin>
</gazebo>
</robot>
URDF: mycobot_280_ros2_controls
<?xml version="1.0" ?>
<robot xmlns:xacro="http://wiki.ros.org/xacro" name="mycobot_280">
<!-- Interface the robot's hardware with the ROS 2 Control library -->
<ros2_control name="RobotSystem" type="system">
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="link1_to_link2">
<command_interface name="position">
<param name="min">-2.879793</param>
<param name="max">2.879793</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="link2_to_link3">
<command_interface name="position">
<param name="min">-2.879793</param>
<param name="max">2.879793</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="link3_to_link4">
<command_interface name="position">
<param name="min">-2.879793</param>
<param name="max">2.879793</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="link4_to_link5">
<command_interface name="position">
<param name="min">-2.879793</param>
<param name="max">2.879793</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="link5_to_link6">
<command_interface name="position">
<param name="min">-2.879793</param>
<param name="max">2.879793</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="link6_to_link6flange">
<command_interface name="position">
<param name="min">-3.05</param>
<param name="max">3.05</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="gripper_controller">
<command_interface name="position">
<param name="min">-0.7</param>
<param name="max">0.15</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="gripper_base_to_gripper_left2">
<param name="mimic">gripper_controller</param>
<param name="multiplier">1.0</param>
<command_interface name="position">
<param name="min">-0.8</param>
<param name="max">0.5</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="gripper_left3_to_gripper_left1">
<param name="mimic">gripper_controller</param>
<param name="multiplier">-1.0</param>
<command_interface name="position">
<param name="min">-0.5</param>
<param name="max">0.5</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="gripper_base_to_gripper_right3">
<param name="mimic">gripper_controller</param>
<param name="multiplier">-1.0</param>
<command_interface name="position">
<param name="min">-0.15</param>
<param name="max">0.7</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="gripper_base_to_gripper_right2">
<param name="mimic">gripper_controller</param>
<param name="multiplier">-1.0</param>
<command_interface name="position">
<param name="min">-0.5</param>
<param name="max">0.8</param>
</command_interface>
<state_interface name="position"/>
</joint>
<joint name="gripper_right3_to_gripper_right1">
<param name="mimic">gripper_controller</param>
<param name="multiplier">1.0</param>
<command_interface name="position">
<param name="min">-0.5</param>
<param name="max">0.5</param>
</command_interface>
<state_interface name="position"/>
</joint>
</ros2_control>
</robot>
URDF object : grasp_box urdf object of interest to collect
<robot name="grasp_box">
<!-- Colours for RVIZ for geometric elements -->
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="red">
<color rgba="0.8 0 0 1"/>
</material>
<material name="green">
<color rgba="0 0.8 0 1"/>
</material>
<material name="grey">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="white">
<color rgba="1.0 1.0 1.0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<!-- * * * Link Definitions * * * -->
<link name="grasp_box_base_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.1" />
<inertia ixx="0.000133333333333" ixy="0.0" ixz="0.0" iyy="0.000133333333333" iyz="0.0" izz="0.000133333333333"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.04"/>
</geometry>
<surface>
<friction>
<ode>
<mu>1.0</mu> <!-- Adjust as needed -->
<mu2>1.0</mu2> <!-- Adjust as needed -->
</ode>
</friction>
</surface>
</collision>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.04"/>
</geometry>
<material name="red"/>
</visual>
</link>
<gazebo reference="grasp_box_base_link">
<kp>100000.0</kp>
<kd>100.0</kd>
<mu1>1.0</mu1>
<mu2>1.0</mu2>
<material>Gazebo/Red</material>
</gazebo>
</robot>
shown of result:
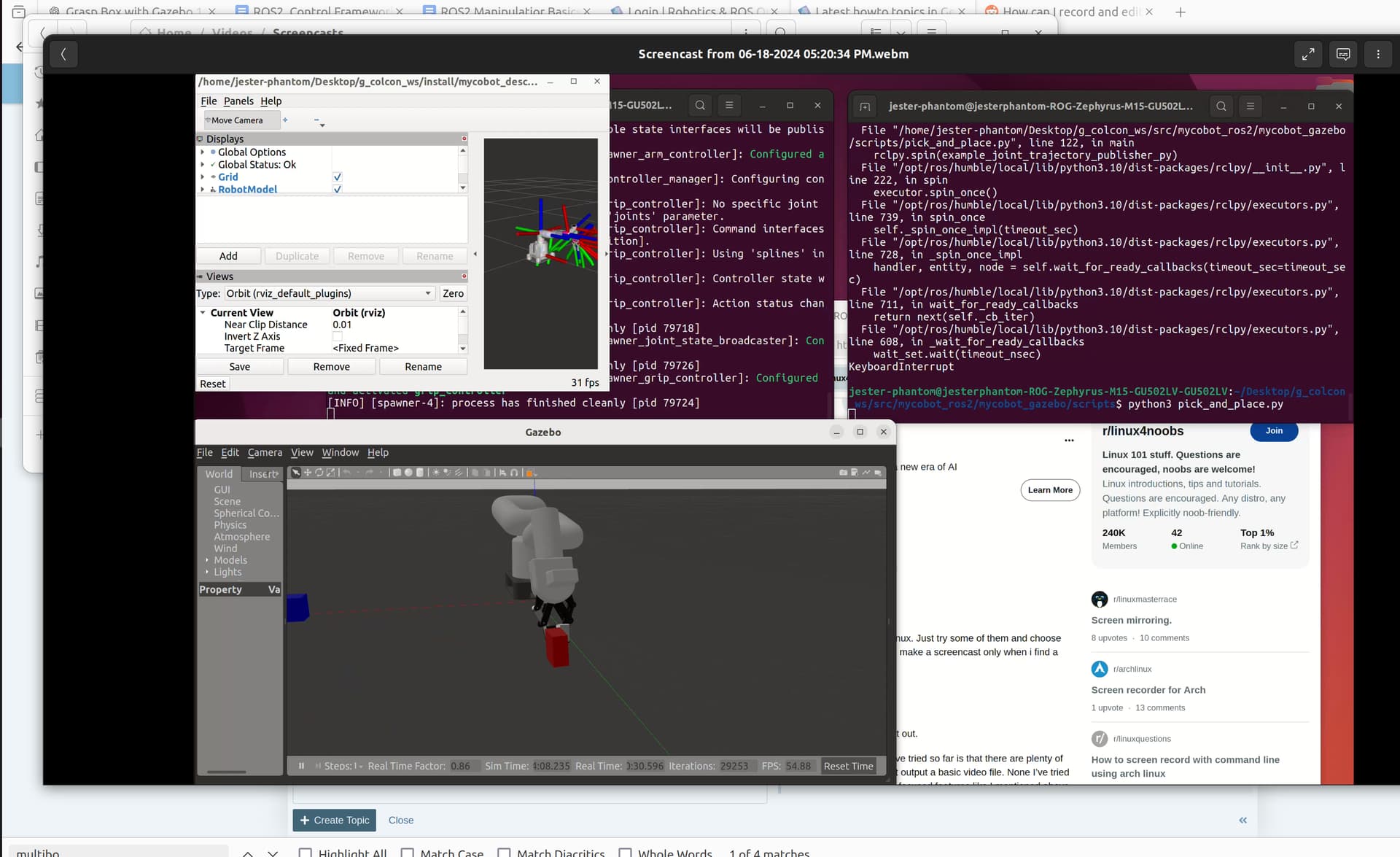
Thank you again for your time and reading this post!