Hi all,
i have looked for solutions online, and it boils down to:
Running all the nodes from a single launch file (Did not work for me)
Synchronization error
If there is an alternative approach to this. do let me know.
Thanks in advance.
Hi @Joseph1001 ,
If I remember correctly, there are a few things that cause this problem.
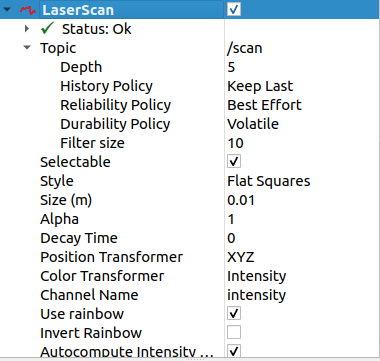
Incorrect QoS settings used by the LaserScan topic, including history policy.
You are using the incorrect Fixed Frame on Rviz GUI.
The frame_id of the LaserScan message is:
not present in the same TF tree as that of the Fixed Frame that you wish to use in the RViz
not a child frame of the frame of base_link of the robot.
Running from one launch or multiple launch files is not related to this problem, so you can use a single launch file if you wish.
I hope this helps. These are the causes I have noted so far.
Regards,
Hi @girishkumar.kannan ,
The ones i set did not match the ones from the course.
Thanks a ton.
Hi @Joseph1001 ,
Glad to know that I could be of help to you and resolve your issue!
Regards,
system
March 4, 2024, 6:44am
5
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.