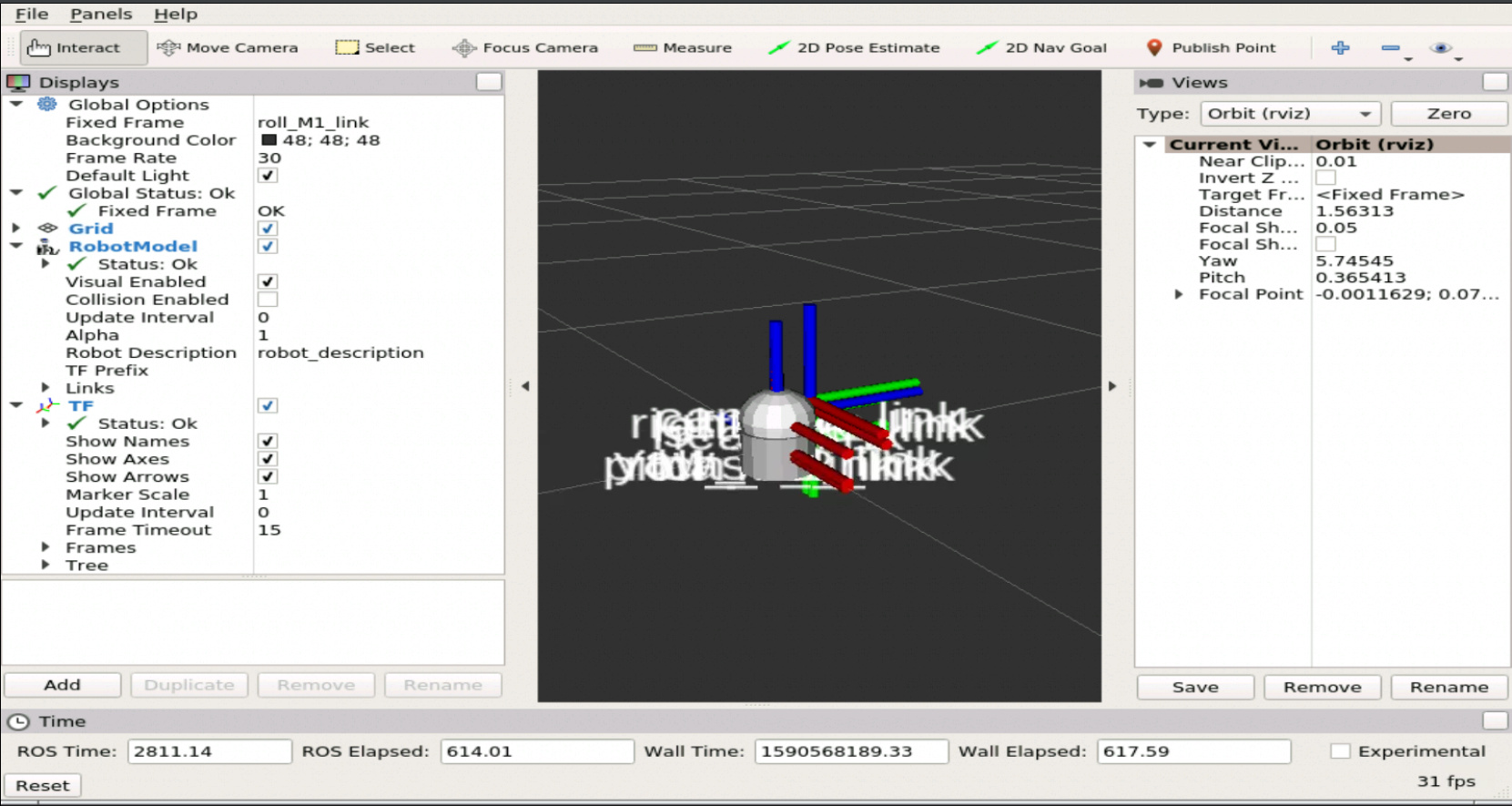
Hello, is there a way to modify the size of the links labels and joints rpy system? I understand I am just working with the rpy system, and not with the robot body. Although it would be nice to differentiate what is written or at least reduce the size of the xyz axis.
As you can see in the picture, the xyz axis and rpy system seem too big.
Thank you!