Hello guys,
I have installed ROS2 Foxy on a VM (Oracle VirtualBox) running on Ubuntu 20.04 and I am trying to run a very simple navigation with my Turtlebot3 Burger robot but I can’t make it work.
The thing is that I have also set up a PC (not VM) on Ubuntu 20.04 (same setup ROS2 Foxy) and the same scripts run with no problem…
Here is what happens:
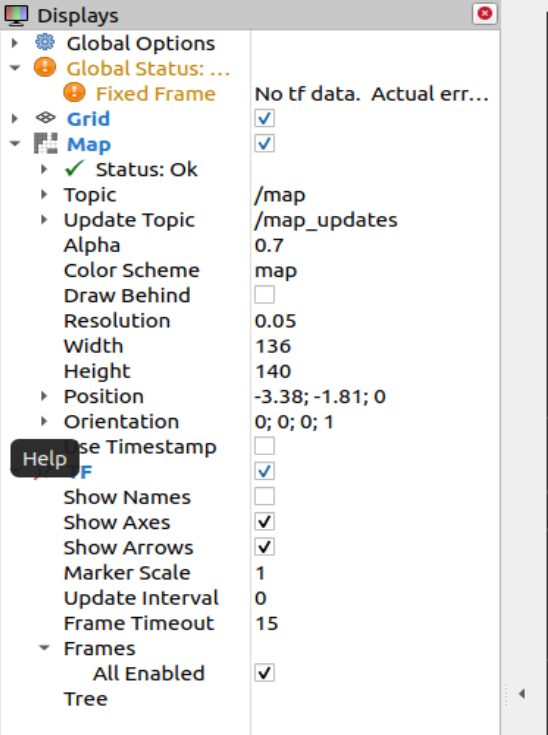
I run the bring up, then the localization server and then the rviz2. When I run the rviz2 I see an error on the fixed frame “No tf data”, I can also see that TF frames are just showing “All Enables = True”, there is no “base_footprint, base_link, etc, etc” like there is on the PC.
Then I run the path_planner and I get an error that I also don’t get on the other PC: “tf error: Invalid frame ID “map” passed to canTransform argument target_frame - frame does not exist”.
Do you have any ideas what I am missing here? How can the same scripts run on the PC and not on the VM? What should I look for?
I am attaching a screenshot of the problematic RVIZ2 to take a look.
Than you for your time,
Nikos