Below is the URDF file i am spawning into Gazebo.
<?xml version="1.0"?>
<robot name="mira">
<material name="grey">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<link name="base_link">
</link>
<link name="body_link">
<inertial>
<origin xyz="0 0 0" rpy="0.0 0 0"/>
<mass value="0.18" />
<inertia ixx="0.0002835" ixy="0.0" ixz="0.0" iyy="0.0002835" iyz="0.0" izz="0.000324"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
</collision>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.06" length="0.09"/>
</geometry>
<material name="grey"/>
</visual>
</link>
<gazebo reference="body_link">
<kp>100000.0</kp>
<kd>100000.0</kd>
<mu1>10.0</mu1>
<mu2>10.0</mu2>
<material>Gazebo/GreyTransparent</material>
</gazebo>
<joint name="base_joint" type="fixed">
<parent link="base_link"/>
<child link="body_link"/>
<origin xyz="0.0 0 0.0" rpy="0 0 0"/>
</joint>
</robot>
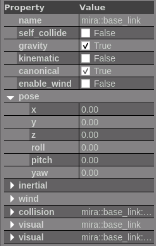
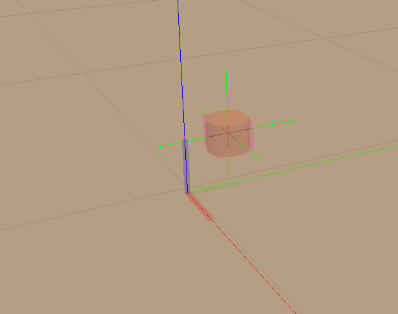
When i spawn it, The model is not aligned to the ground frame. When i checked the gazebo properties for both the model and the ground plane, they are both xyz=0 0 0.
 .
.
@staff Then can you tell me why the model is not aligned with the ground plane even when the gazeb0 properties tab show that they share the same position values?