
I want to ask after I run the command: rosrun tf static_transform_publisher 0 0 0 0 0 0 map odom then odom is attached to map. But I think the odom framework has to be tied to the robot. So what do I have to do to get the frame back to its original state. Since I used tf with base_camera, base_footfrint. And I think I messed up the robot’s inherent tf
Hi @duygiangtemp ,
I am not exactly sure what you are working on. If you can, please provide some context as to what you are doing and trying to accomplish.
I am assuming that you are working on ROS1 Navigation (I cannot see QoS for Map and I can see Unreliable check box so I am confirming it is ROS1 and not ROS2).
I think working on your navigation parameters yaml file can solve your problem.
When working with navigation, map is the best frame to use rather than odom.
I hope this helps.
Regards,
Girish
Just like you said, I’m navigating with ROS1. I followed the instructions in the Navigation in 5 Days course. In the course there are instructions for me to configure using yaml files. But I don’t know the yaml file is the cause of the problem. Gampping or amcl?
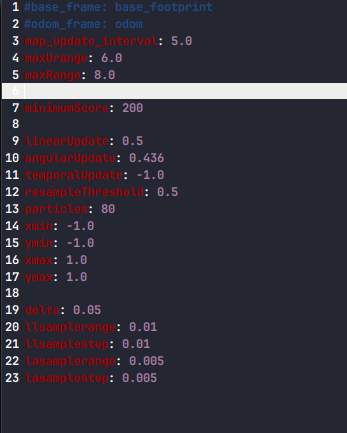
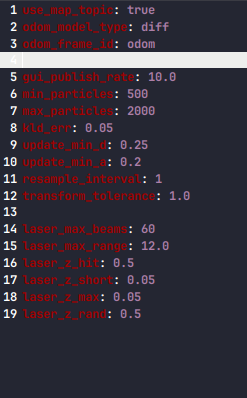
Here are 2 yaml configuration files. I have looked through but don’t know what is the cause of the problem. I still think because of the tf statement above
Hi @duygiangtemp ,
You have made 4 posts and still you have not mentioned what problem you have.
Please describe what is the problem that you are facing.
Also, you need to try changing a lot of parameter values in gmapping, amcl, global_planner, local_planner, move_base_params and costmap_params to suit your needs.
Try to do them one by one, mapping first, then localization, finally path planning. You will get bored and lost if you do all together.
Each parameter is described in detain in the documentation. Refer docs to know what each parameter does and then fine tune your parameters based on your robot’s response in the simulation.
Regards,
Girish
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.