In ROS Control, chapter 3, Exercise 3.4, the task was to plot a graph based on signals we are sending to the robot and the feedback on those signals. I am able to get the plot for the topic /rrbot/joint1_position_controller/command ,and get the plot as follows:
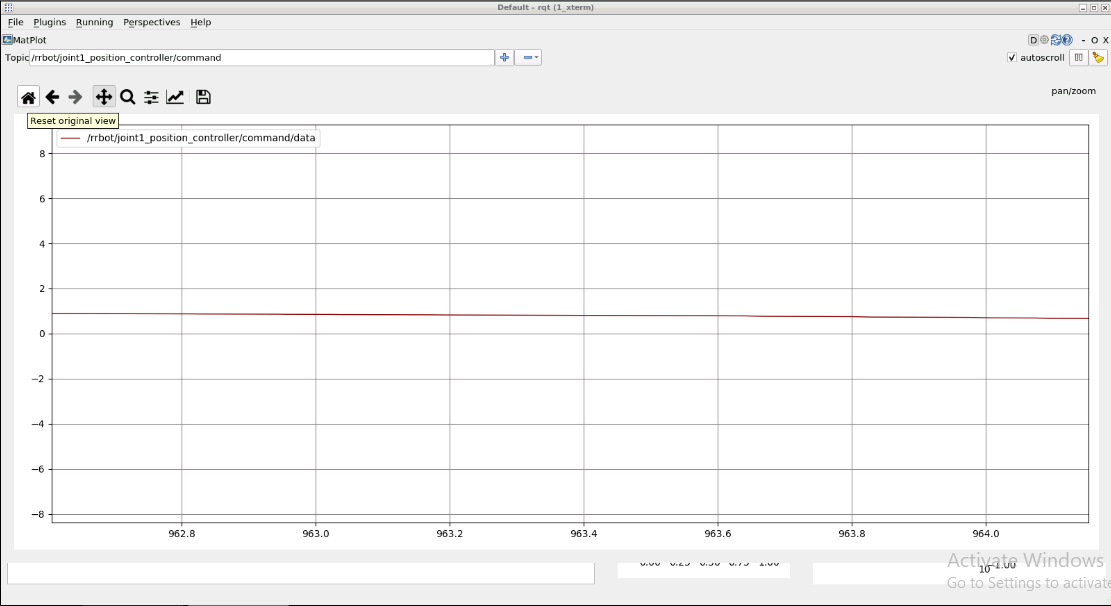
But when I try the same for /rrbot/joint1_position_controller/state/process_value,i am not getting any output.
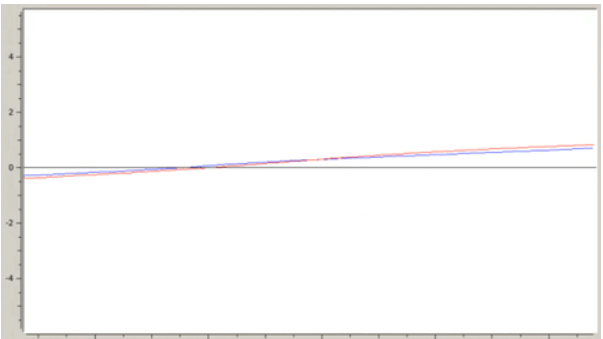
Intended Output:
The intended output should have been 2 graphs slightly overlapping, with one being the signal we are sending out and the other being the feedback signal we are receiving back. The graph should have been as below:
Error Output received:
-
Only the plot for /rrbot/joint1_position_controller/command is shown on graph
-
Instead of /rrbot/joint1_position_controller/state/process_value, i get six other unintended topics and no graph plotted.

The Yaml file is as below:
rrbot:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
joint1_position_controller:
type: effort_controllers/JointPositionController
joint: joint1
pid: {p: 100.0, i: 0.01, d: 10.0}
joint2_position_controller:
type: effort_controllers/JointPositionController
joint: joint2
pid: {p: 100.0, i: 0.01, d: 10.0}
The launch file is below:
<launch>
<rosparam file="$(find my_robot_control)/config/my_robot_control.yaml" command="load"/>
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/rrbot" args="joint1_position_controller joint2_position_controller joint_state_controller"/>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"
respawn="false" output="screen">
<remap from="/joint_states" to="/rrbot/joint_states" />
</node>
</launch>
I have tripled checked the process, but could not find an error. Can you tell me where I went wrong? Thanks in advance