I couldn’t get section 5.4 to work.
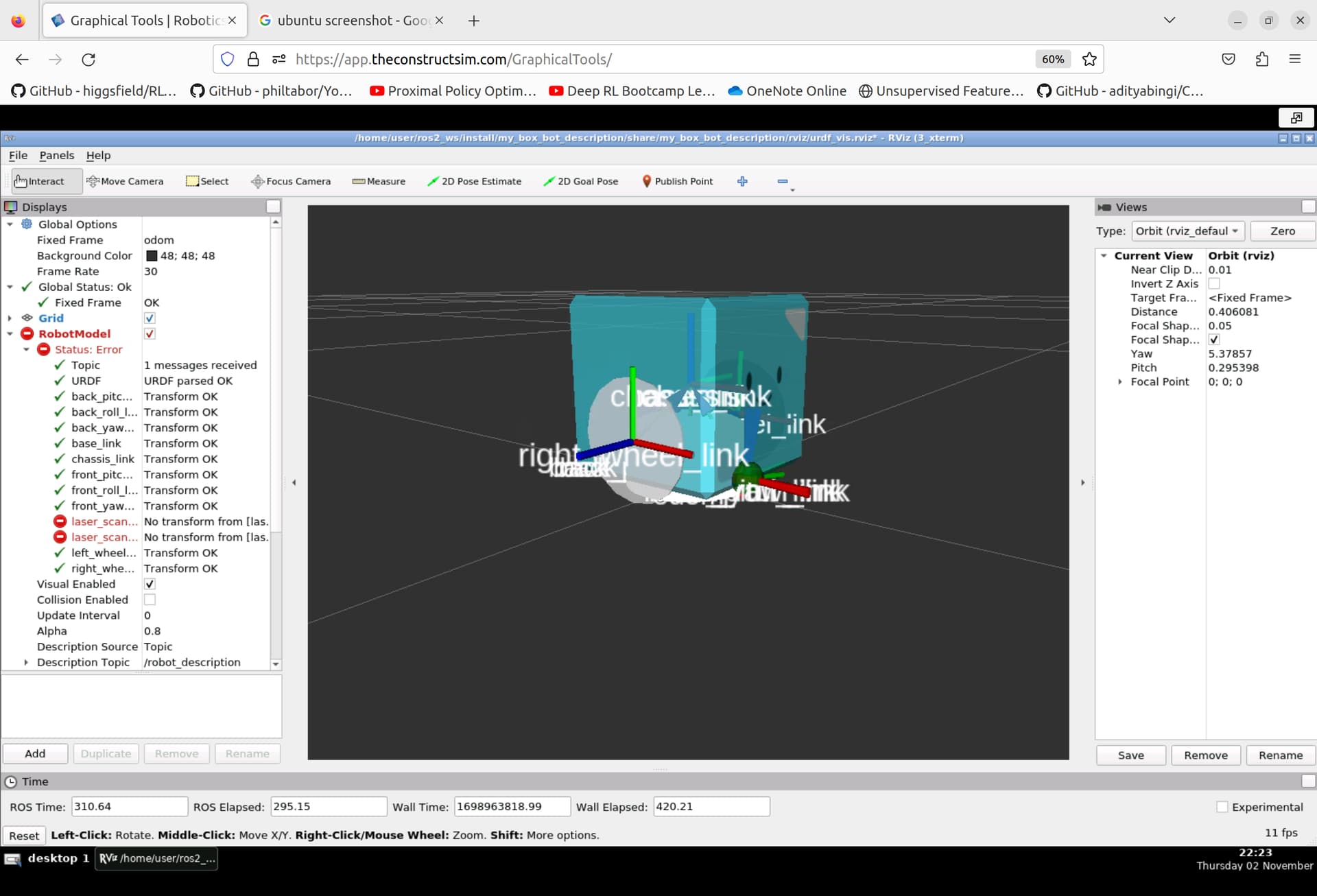
In Rviz the lidar does not show at the top of the robot, with “no transform” error
Gazebo console look like this:
[gzserver-1] [INFO] [1698963398.703108684] [box_bot_joint_state]: Going to publish joint [chassis_to_left_wheel_joint]
[gzserver-1] [INFO] [1698963398.703817784] [box_bot_joint_state]: Going to publish joint [chassis_to_rightwheel_joint]
[gzserver-1] [INFO] [1698963398.703848648] [box_bot_joint_state]: Going to publish joint [chassis_to_front_yaw_joint]
[gzserver-1] [INFO] [1698963398.703868332] [box_bot_joint_state]: Going to publish joint [chassis_to_back_yaw_joint]
[gzserver-1] [INFO] [1698963398.703886588] [box_bot_joint_state]: Going to publish joint [front_yaw_to_front_roll_joint]
[gzserver-1] [INFO] [1698963398.703904284] [box_bot_joint_state]: Going to publish joint [back_yaw_to_back_roll_joint]
[gzserver-1] [INFO] [1698963398.703922876] [box_bot_joint_state]: Going to publish joint [front_roll_to_front_pitch_joint]
[gzserver-1] [INFO] [1698963398.703943612] [box_bot_joint_state]: Going to publish joint [back_roll_to_back_pitch_joint]
[gzserver-1] [INFO] [1698963398.893661659] [differential_drive_controller]: Wheel pair 1 separation set to [0.100000m]
[gzserver-1] [INFO] [1698963398.893735811] [differential_drive_controller]: Wheel pair 1 diameter set to [0.070000m]
[gzserver-1] [INFO] [1698963398.896178607] [differential_drive_controller]: Subscribed to [/cmd_vel]
[gzserver-1] [INFO] [1698963398.898962002] [differential_drive_controller]: Advertise odometry on [/odom]
[gzserver-1] [INFO] [1698963398.902352218] [differential_drive_controller]: Publishing odom transforms between [odom] and [base_link]
[gzserver-1] [INFO] [1698963399.004704465] [gazebo_ros2_control]: Loading gazebo_ros2_control plugin
[gzserver-1] [INFO] [1698963399.009901344] [gazebo_ros2_control]: Starting gazebo_ros2_control plugin in namespace: /
[gzserver-1] [INFO] [1698963399.009987881] [gazebo_ros2_control]: Starting gazebo_ros2_control plugin in ros 2 node: gazebo_ros2_control
[gzserver-1] [INFO] [1698963399.010052656] [gazebo_ros2_control]: Loading parameter file /home/user/ros2_ws/install/my_box_bot_description/share/my_box_bot_description/config/controller_position.yaml
[gzserver-1]
[gzserver-1] [INFO] [1698963399.013748978] [gazebo_ros2_control]: connected to service!! /my_robot_state_publisher_node
[gzserver-1] [ERROR] [1698963399.093357575] [rclcpp]: Received invalid sequence number. Ignoring…
[gzserver-1] [INFO] [1698963399.093570614] [gazebo_ros2_control]: Recieved urdf from param server, parsing…
[gzserver-1] [WARN] [1698963399.113470772] [gazebo_ros2_control]: Skipping joint in the URDF named ‘laser_scan_link_joint’ which is not in the gazebo model.
[gzserver-1] [INFO] [1698963399.114235936] [gazebo_ros2_control]: Loading controller_manager
[gzserver-1] [WARN] [1698963399.190865273] [gazebo_ros2_control]: Desired controller update period (0.01 s) is slowerthan the gazebo simulation period (0.001 s).
[gzserver-1] [INFO] [1698963399.191028861] [gazebo_ros2_control]: Loaded gazebo_ros2_control.
[gzserver-1] [INFO] [1698963399.400595647] [controller_manager]: Loading controller ‘joint_trajectory_controller’
[gzserver-1] [INFO] [1698963399.507046221] [controller_manager]: Loading controller ‘joint_state_broadcaster’
[gzserver-1] [INFO] [1698963399.585599002] [controller_manager]: Configuring controller ‘joint_trajectory_controller’
[gzserver-1] [INFO] [1698963399.585992253] [joint_trajectory_controller]: Command interfaces are [position] and and state interfaces are [position velocity].
[gzserver-1] [INFO] [1698963399.588905656] [joint_trajectory_controller]: Controller state will be published at 50.00 Hz.
[gzserver-1] [INFO] [1698963399.594977817] [joint_trajectory_controller]: Action status changes will be monitored at 20.00 Hz.
[gzserver-1] [INFO] [1698963399.601181580] [controller_manager]: Configuring controller ‘joint_state_broadcaster’
[gzserver-1] [INFO] [1698963399.601441149] [joint_state_broadcaster]: ‘joints’ or ‘interfaces’ parameter is empty. Allavailable state interfaces will be published
[gzserver-1] [ERROR] [1698963399.605329405] [controller_manager]: Can’t activate controller ‘joint_trajectory_controller’: Command interface with ‘laser_scan_link_joint/position’ does not exist
[gzserver-1] [ERROR] [1698963399.692079926] [joint_state_broadcaster]: None of requested interfaces exist. Controller will not run.
[gzserver-1] [ERROR] [1698963399.692242767] [controller_manager]: After activating, controller ‘joint_state_broadcaster’ is in state ‘finalized’, expected Active
It complains that joint “laser_scan_link_joint” does not exist.
But I have copy and pasted the following 5 files from the course notebook (I tried to type my own version as I learn, but struggled to get it to work):
- control.launch.py
- spawn_robot_ros2_control_complete.launch.py
- controller_position_yaml
- urdf_visualize_control_complete.launch.py
- box_bot_control_complete.urdf
Is anyone else having similar problem?
Thanks!