Hi @duckfrost2,
Thank you for your help.
Edit 1: Straight line movements work great indeed for localization, unlike rotations which cause the particles to spread out very quickly and then completely lose calibration. Should I modify the alpha parameters?
The use_sim_time was set to False, it was only the last try and I forgot to change it when I copied it here. So that it’s not a problem.
The odometry data is accurate, just made a last check, so I would say that this is not an issue also.
About the rate issue, I think that everything is fine because the laser data is shown correctly in rviz and that is what everything is based on (the odometry and mapping or localization process). If you have a suggestion for testing it, please let me know.
Also, I increased the number of beams to 180, I think that it is a small improvement, maybe it is just my hope, but it seems a little better.
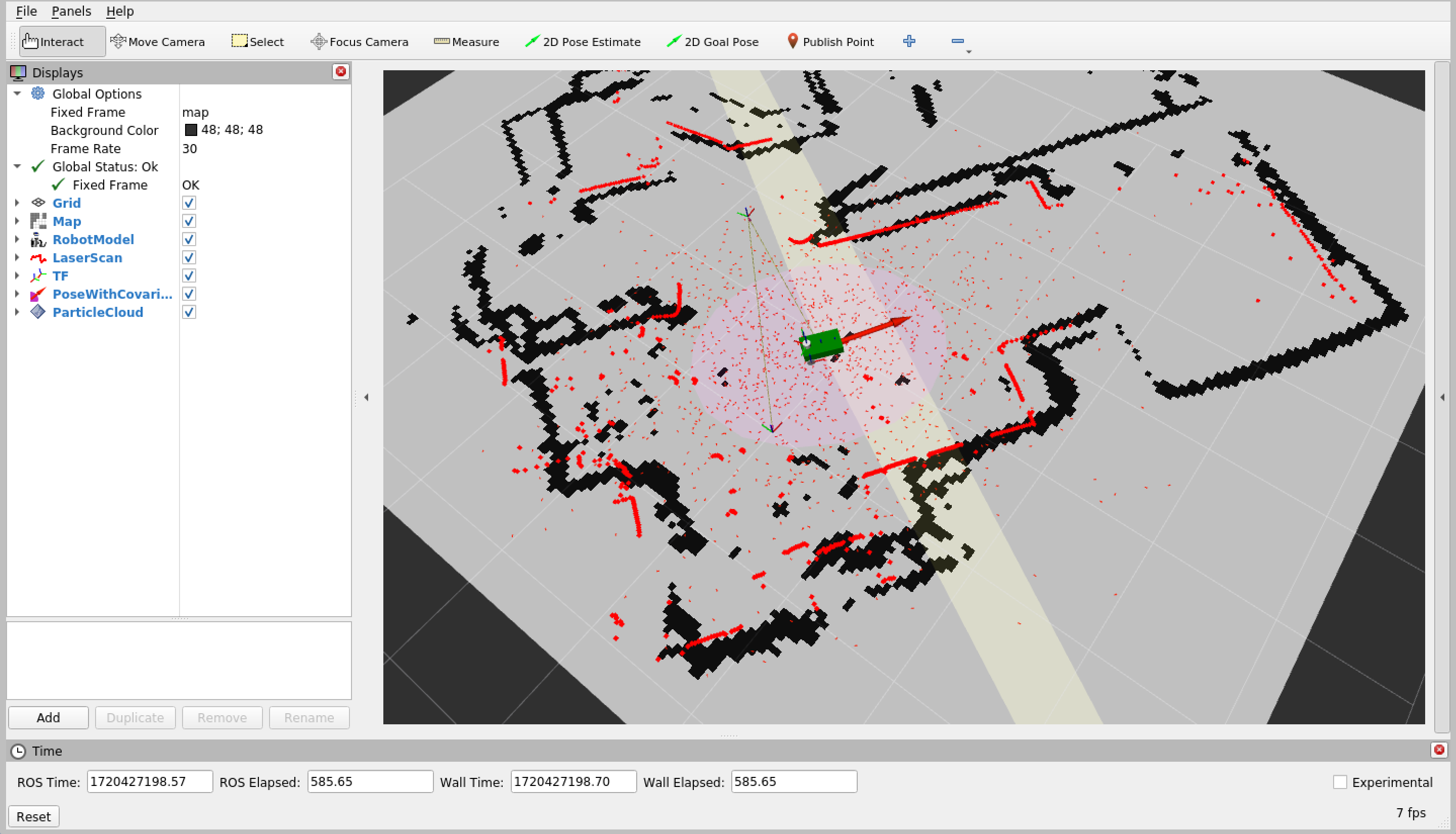
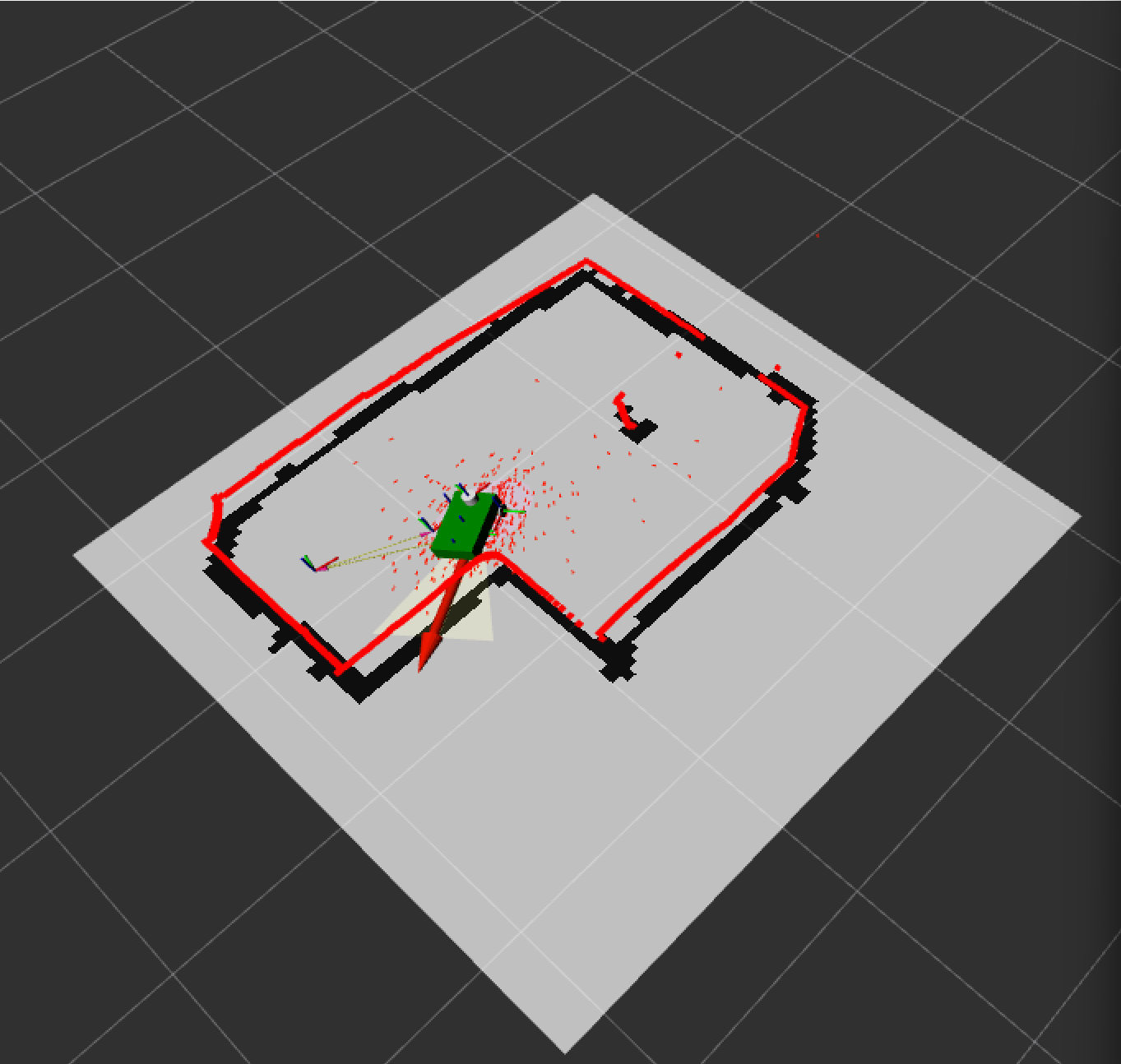
What I found in the last testing session was that on straight line, the localization is working, so the particles around the robot are getting much closer, but when it turns, it’s getting noisy very fast. In the picture below it was just a slow turn, if it is a faster one, it will be completely lost. I don’t really know what could be the problem.
After the turn was made:
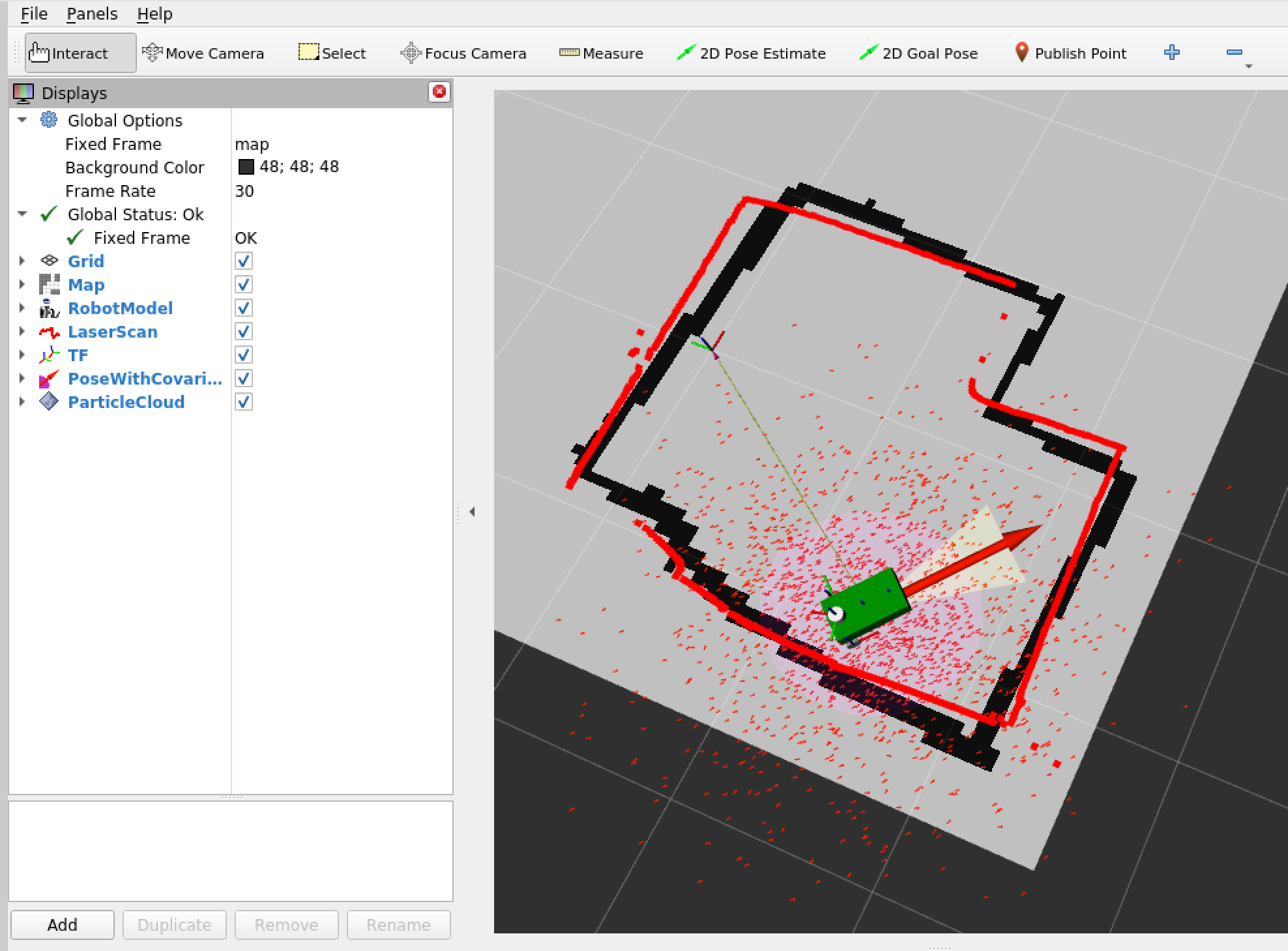
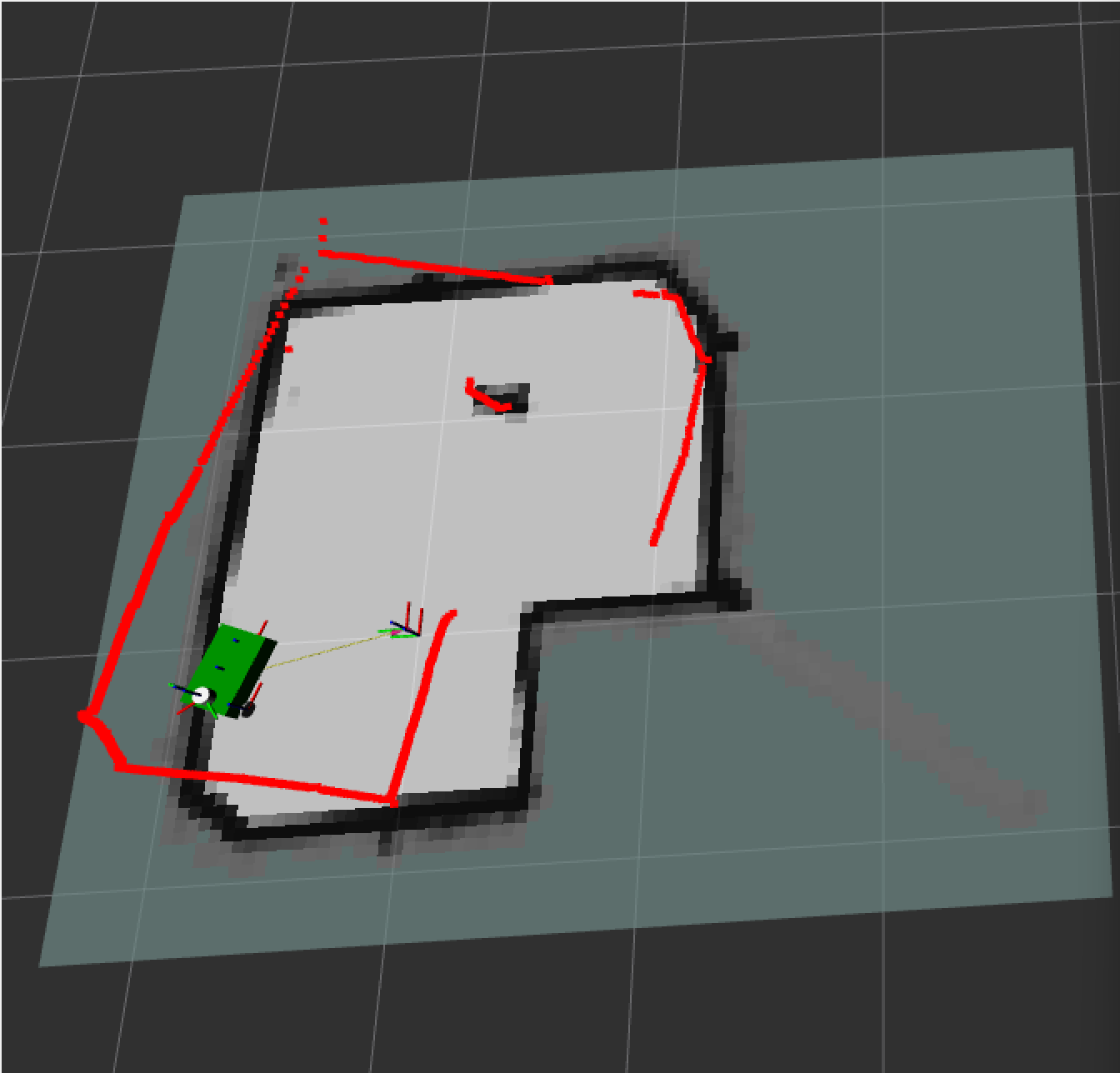
And after straight line:
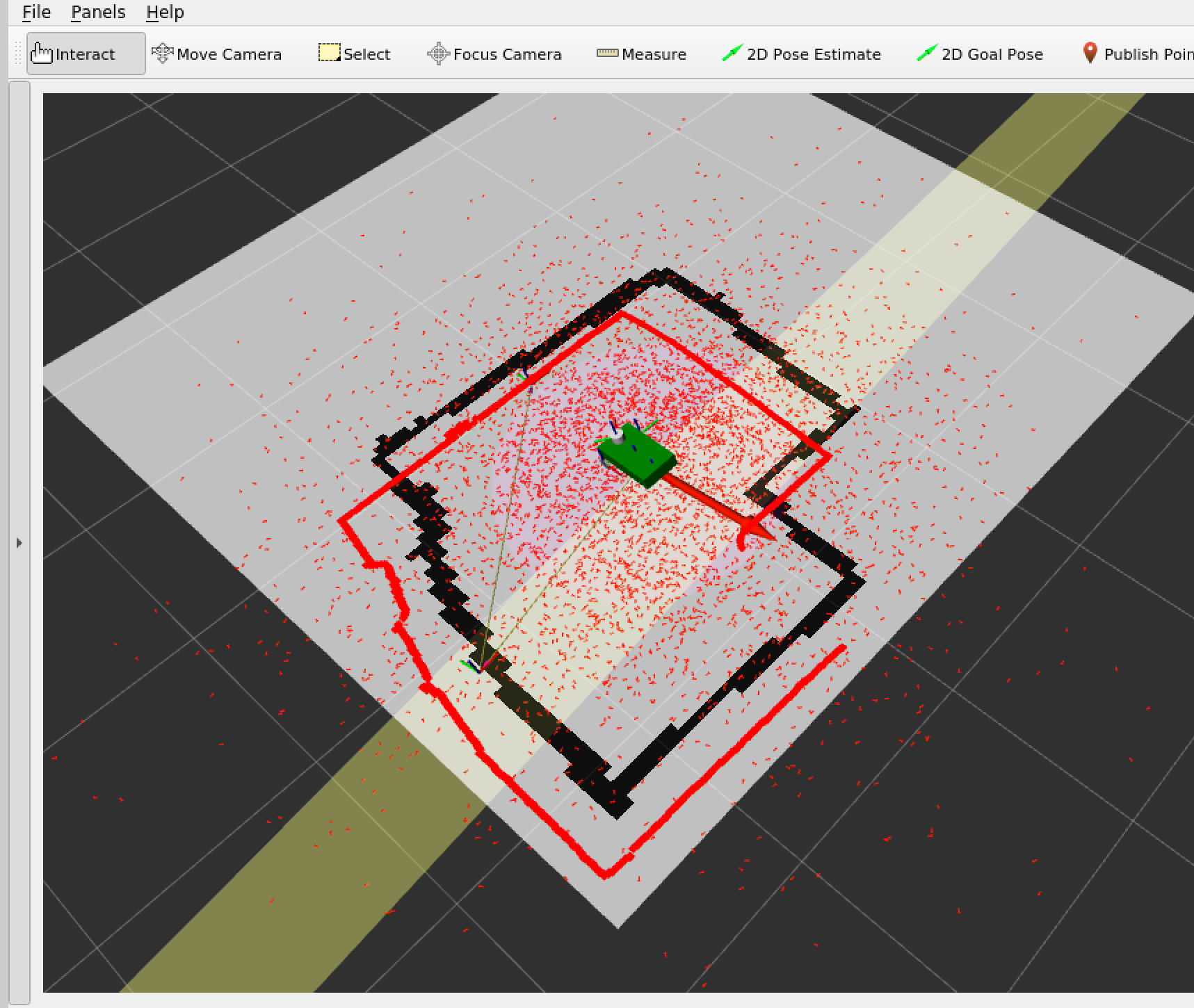
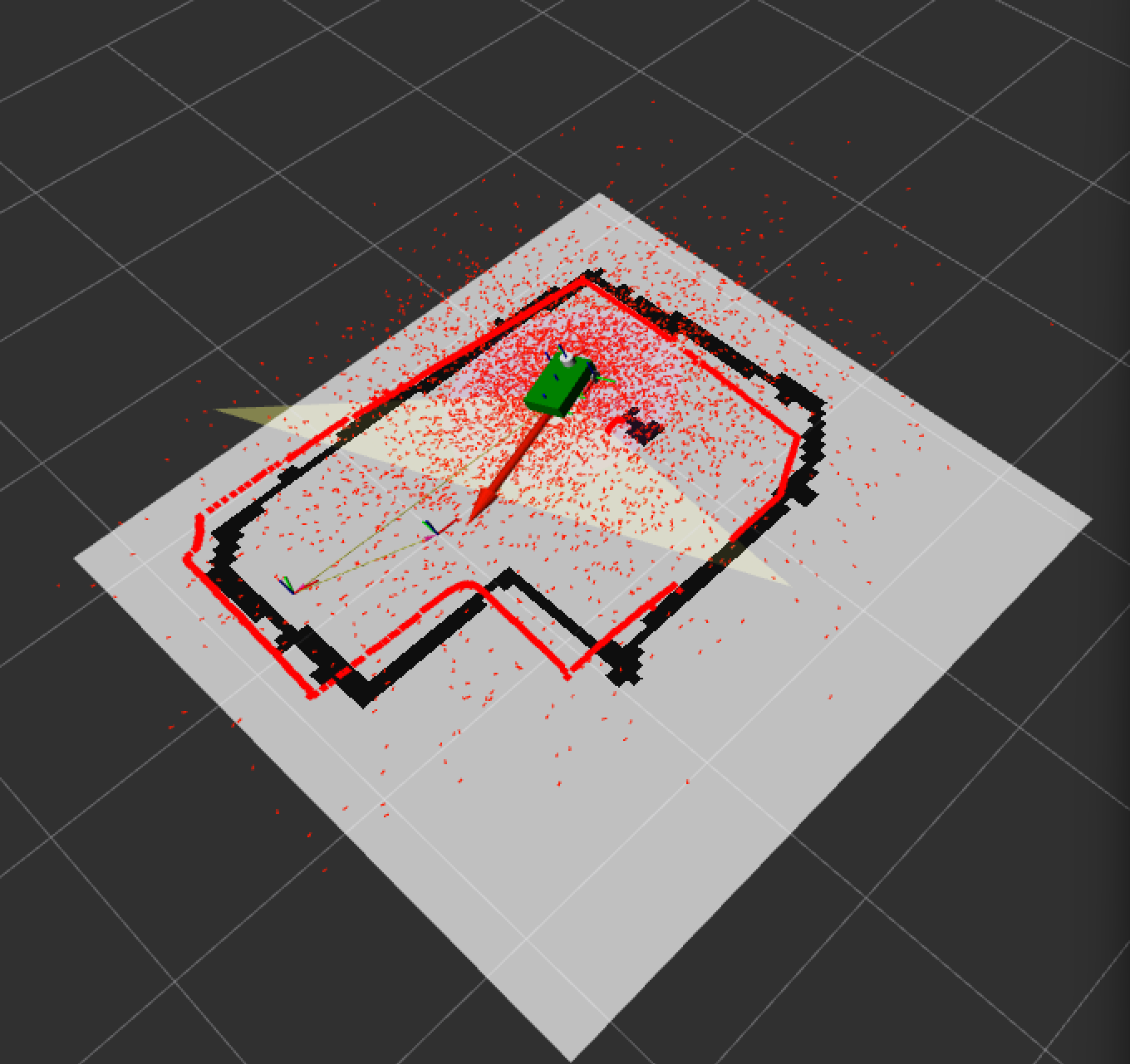
In the testing session I also noticed something at the mapping process that could be connected with this issue. The map is made correctly, very accurate, but after 4-5 turns through it, the map outline is not perfectly overlaid with the laser scan anymore. Even after this, made a few more rounds and the map remained the same, it did not made extra walls that did not exist or something.
Mapping:
Please let me know what is your opinion about this and how could I improve it.
Edit 2: Should the nodes be synchronized in time? Could this be a problem?
Thank you,
Stefan