Hi,
I get an error while doing URDF course Exercise U1-2. I also used the codes in the course. But the result has not changed.
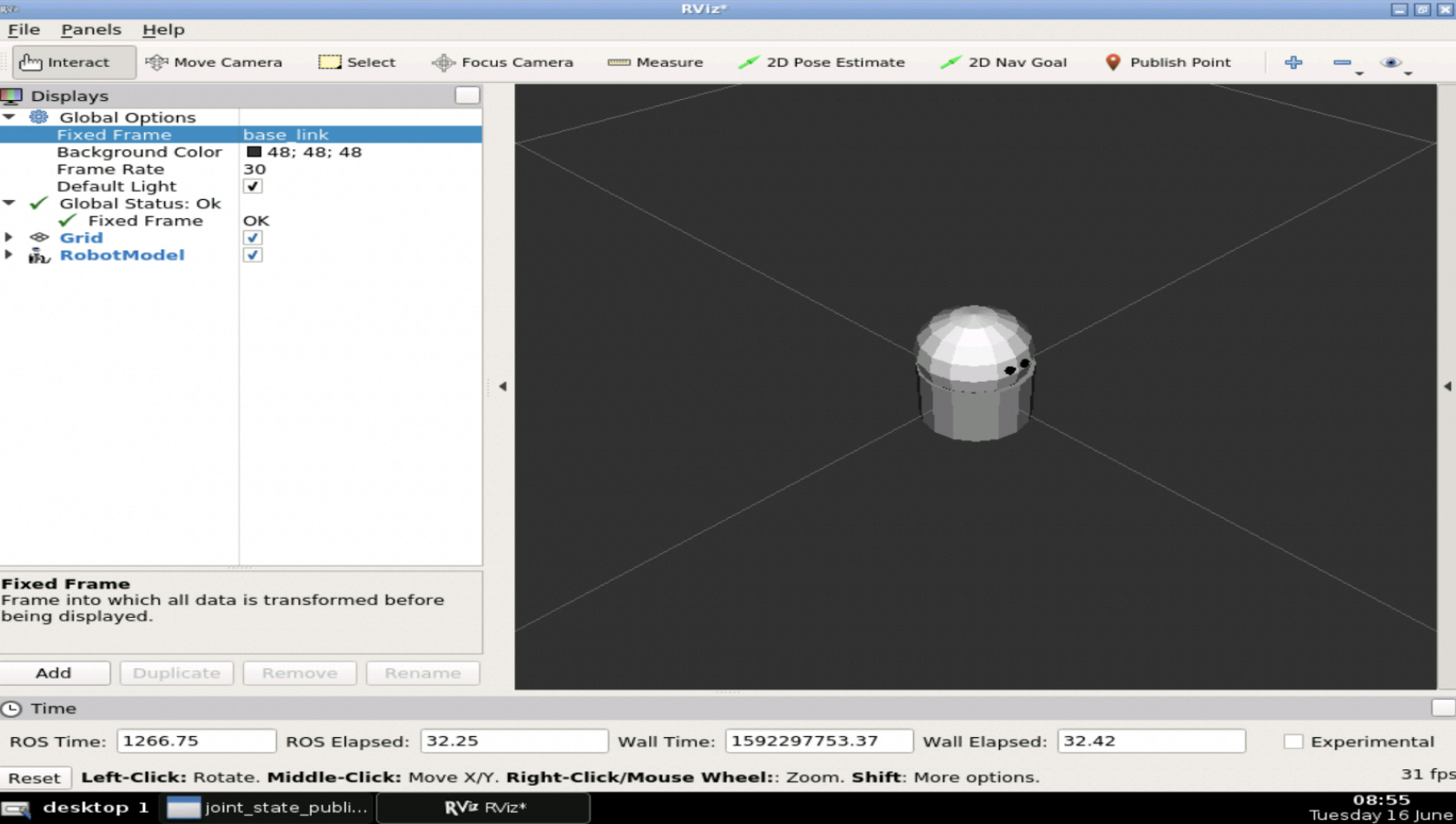
1- roslaunch my_mira_description urdf_visualize.launch model:=’$(find my_mira_description)/urdf/mira_geometric.urdf’
— While running, the following error message appears on the terminal
“[WARN] [1592135446.920831, 1288.858000]: The ‘use_gui’ parameter was specified, which is deprecated. We’ll attempt to find and run the GUI, but if this fails you should install the ‘joint_state_publisher_gui’ package instead and run that. This backwards compatibility option will be removed in Noetic.”
2-
3-
4-
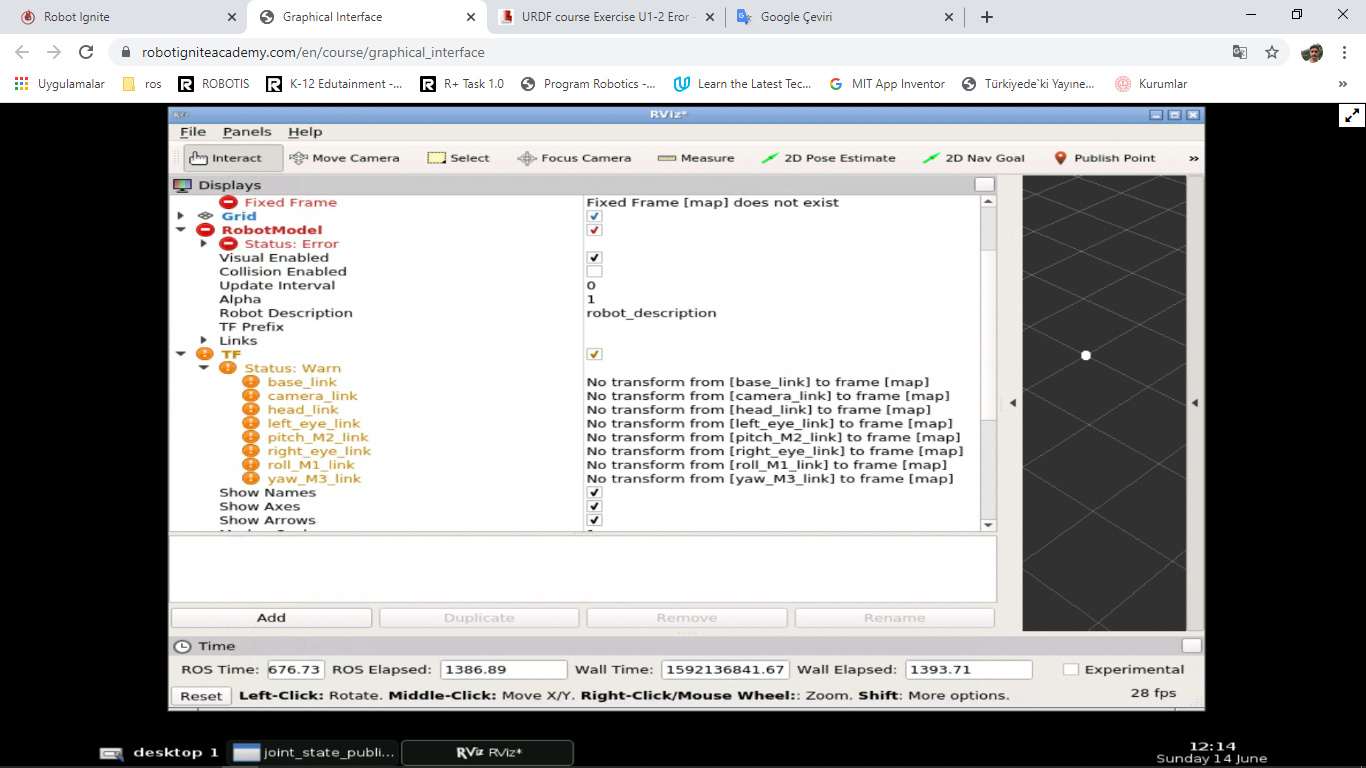
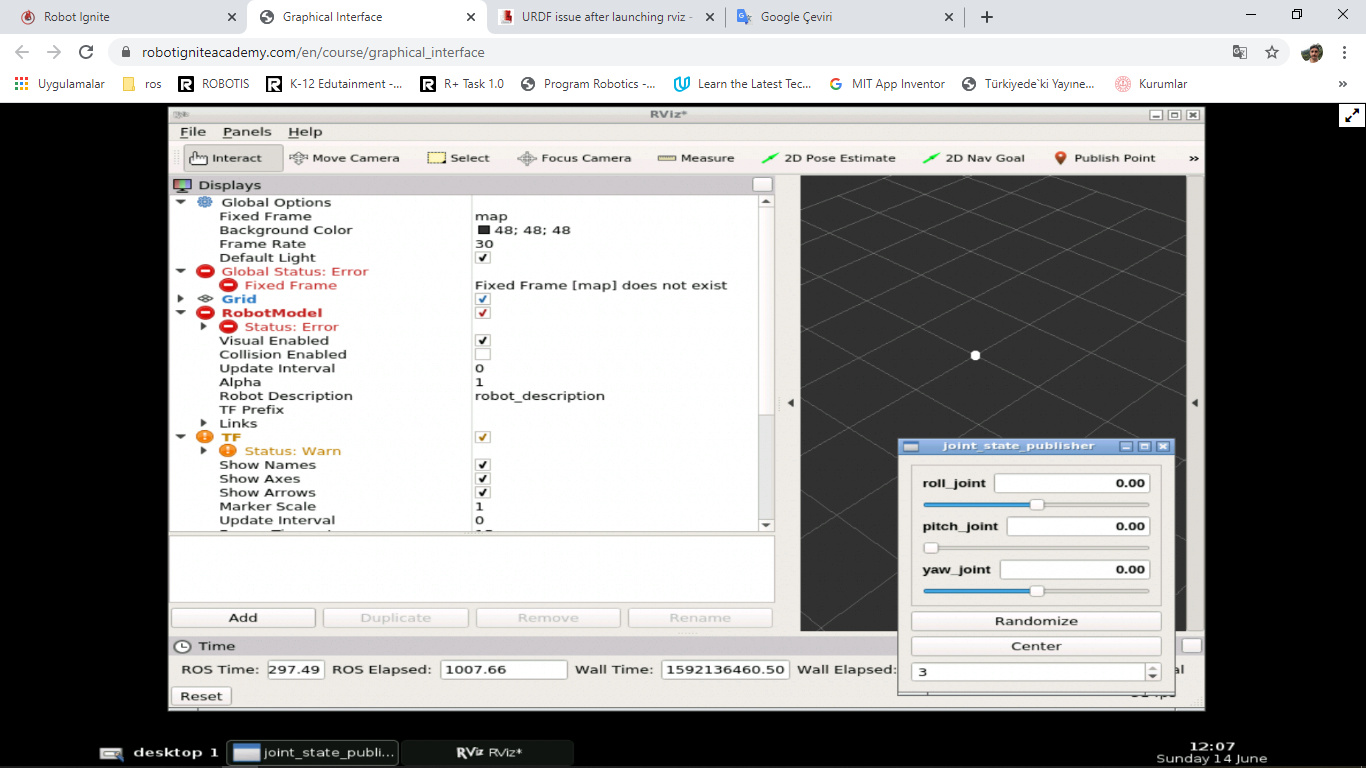
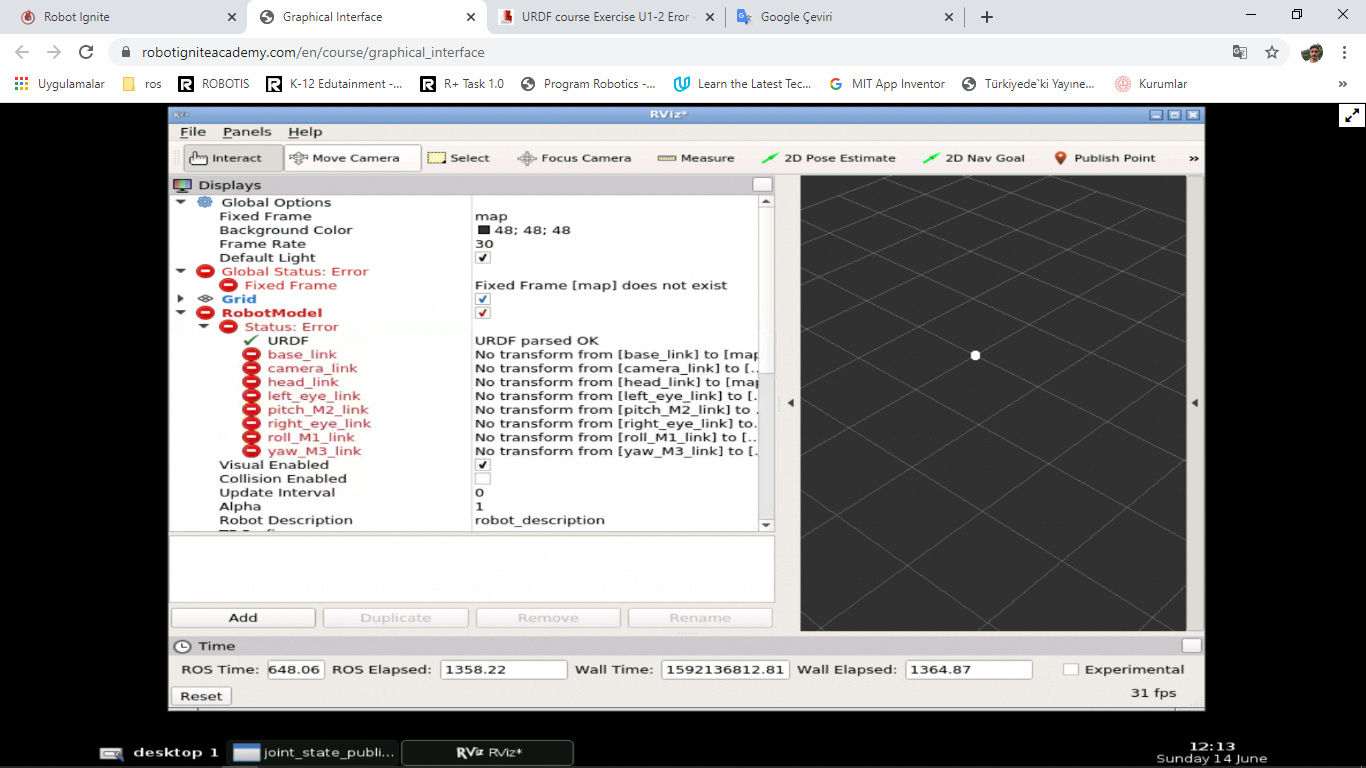
There is nothing about the robot model and TF in Rviz.
How can I fix this, help me please