Hello,
I have create code for three utrasone sensors on my robot. When I do a rostopic echo /RightSonarDistance the correct values are displayed on the terminal. So that seems to work.
No I have created axacro robot model which loads correctly into RViz but it should show the sensor output. Unfortunately I can get it work correctly.
This is how my xacro file looks like, at the bottom is the sensor definition:
<?xml version="1.0"?>
<robot xmlns:xacro="http://ros.org/wiki/xacro" name="r2g2">
<!-- Define the material for visualization -->
<material name="gray">
<color rgba="0.5 0.5 0.5 1"/>
</material>
<!-- Define the wheel radius and separation distance -->
<xacro:property name="base_width" value="0.17"/>
<xacro:property name="base_len" value="0.27"/>
<xacro:property name="wheel_radius" value="0.035"/>
<xacro:property name="base_wheel_gap" value="0.007"/>
<xacro:property name="wheel_separation" value="0.17"/>
<xacro:property name="wheel_joint_offset" value="0.045"/>
<!--Base Footprint-->
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<!-- Base Link -->
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="${base_len} ${base_width} 0.01"/>
</geometry>
<material name="gray"/>
</visual>
</link>
<!--base_link to base_footprint Joint-->
<joint name="base_link_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<!-- Left Wheel and Link-->
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${pi/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length="0.009"/>
</geometry>
<material name="gray"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${pi/2} 0 0"/>
<geometry>
<cylinder radius="${wheel_radius}" length="0.009"/>
</geometry>
</collision>
</link>
<joint name="left_wheel_joint" type="continuous">
<axis xyz="0 1 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="left_wheel_link"/>
<origin xyz="${wheel_joint_offset} ${((base_width/2)+base_wheel_gap)*1} -0.005" rpy="0 0 0"/>
</joint>
<!-- Right Wheel and Link-->
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${pi/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length="0.009"/>
</geometry>
<material name="gray"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${pi/2} 0 0"/>
<geometry>
<cylinder radius="${wheel_radius}" length="0.009"/>
</geometry>
</collision>
</link>
<joint name="right_wheel_joint" type="continuous">
<axis xyz="0 1 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="right_wheel_link"/>
<origin xyz="${wheel_joint_offset} ${((base_width/2)+base_wheel_gap)*-1} -0.005" rpy="0 0 0"/>
</joint>
<!-- Right Ultrasone sensor-->
<joint name="right_ultrasone_joint" type="fixed">
<axis xyz="0 1 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="right_ultrasone_link"/>
<origin xyz="${(base_len/2)} ${(base_width/2)*-1} -0.01" rpy="0 0 0.523598"/>
</joint>
<link name="right_ultrasone_link">
<visual>
<origin xyz="0 0 0" rpy="${pi/2} 0 0" />
<geometry>
<cylinder radius="0.005" length="0.015"/>
</geometry>
<material name="gray"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${pi/2} 0 0"/>
<geometry>
<cylinder radius="0.005" length="0.015"/>
</geometry>
</collision>
</link>
</robot>
Here a screenshot of the output of RViz
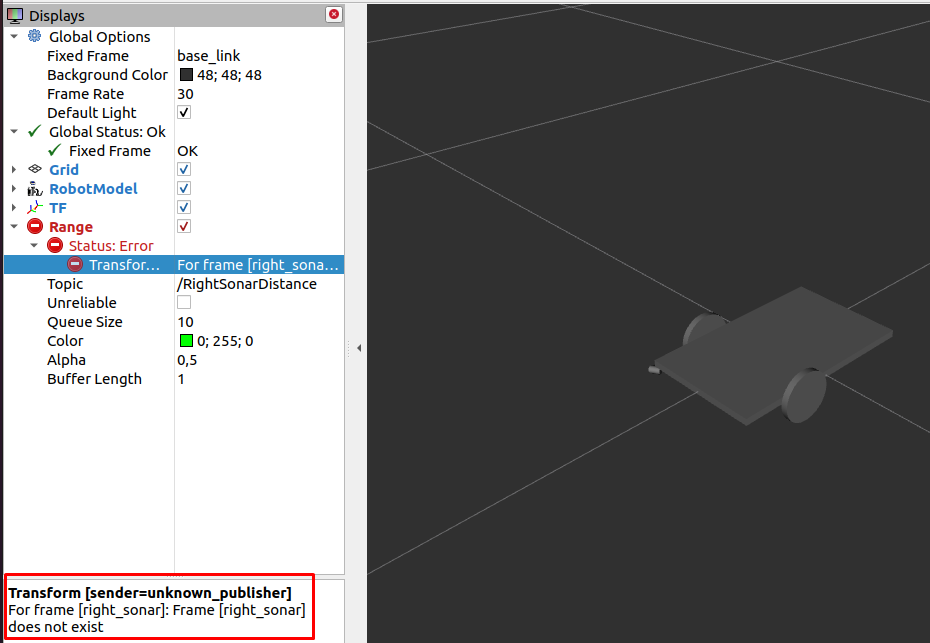
RViz tells me that
right_sonar frame does not exist. But I dont know how to fix this could anybody point me out what I am doing wrong?