Firstly, i’d like to say that the code runs fine, but the robot does not do what it’s supposed to do. But thats not my question.
The question is: Why are the pitch_joint and yaw_joint joints in my joint_state_publisher missing in Rviz? This is my current code:
<?xml version="1.0"?><link name = "roll_link">
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.002" length="0.001"/>
</geometry>
</link>
<joint name="roll_joint" type="revolute">
<parent link = "base"/>
<child link = "roll_link"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz = "1 0 0"/>
</joint>
<link name = "pitch_link">
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.002" length="0.001"/>
</geometry>
</link>
<joint name="pitch_joint" type="revolute">
<parent link = "roll_link"/>
<child link = "pitch_link"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<limit lower="0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz = "0 1 0"/>
</joint>
<link name = "yaw_link">
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.002" length="0.001" />
</geometry>
</link>
<joint name="yaw_joint" type="revolute">
<parent link = "pitch_link"/>
<child link = "yaw_link"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<limit lower="0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz = "0 0 1"/>
</joint>
<link name= "head">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<sphere radius="0.06"/>
</geometry>
</visual>
</link>
<joint name="head_joint" type="revolute">
<parent link="yaw_link"/>
<child link="head"/>
<origin xyz="0 0 0.06" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
<link name="left_eye">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.005" radius="0.005"/>
</geometry>
</visual>
</link>
<link name="right_eye">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.005" radius="0.005"/>
</geometry>
</visual>
</link>
<joint name="l_eye_joint" type="fixed">
<parent link="head"/>
<child link="left_eye"/>
<origin xyz = "0.06 0.01 0" rpy="0 1.5707 0"/>
</joint>
<joint name="r_eye_joint" type="fixed">
<parent link="head"/>
<child link="right_eye"/>
<origin xyz = "0.06 -0.01 0" rpy="0 1.5707 0"/>
</joint>
And this is what i see in RViz:
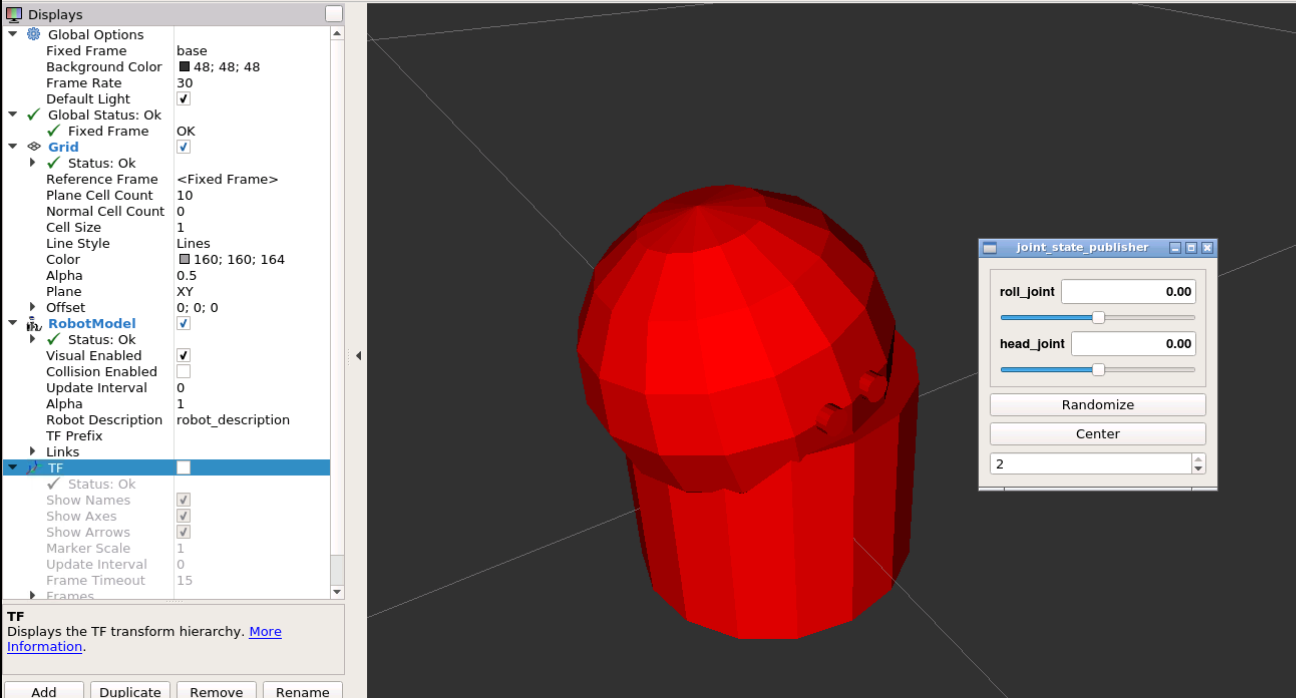
Only the roll_joint and head_joint are displayed in Rviz even though i explicitly defined the other joints within my URDF code. Pls help, thanks!