I’m relatively new to ROS. I started with raw URDF exported from SOLIDWORKS. Then created moveit_config package by moveit_setup_assistant. Here are the related files:
Here is the ROSJECT that I created to demonstrate my problem: prochesta_arm
URDF file: ~/catkin_ws/src/prochesta_arm/urdf/prochesta_arm.urdf.xacro
gazebo.launch file: ~/catkin_ws/src/prochesta_arm_moveit_config/launch/gazebo.launch
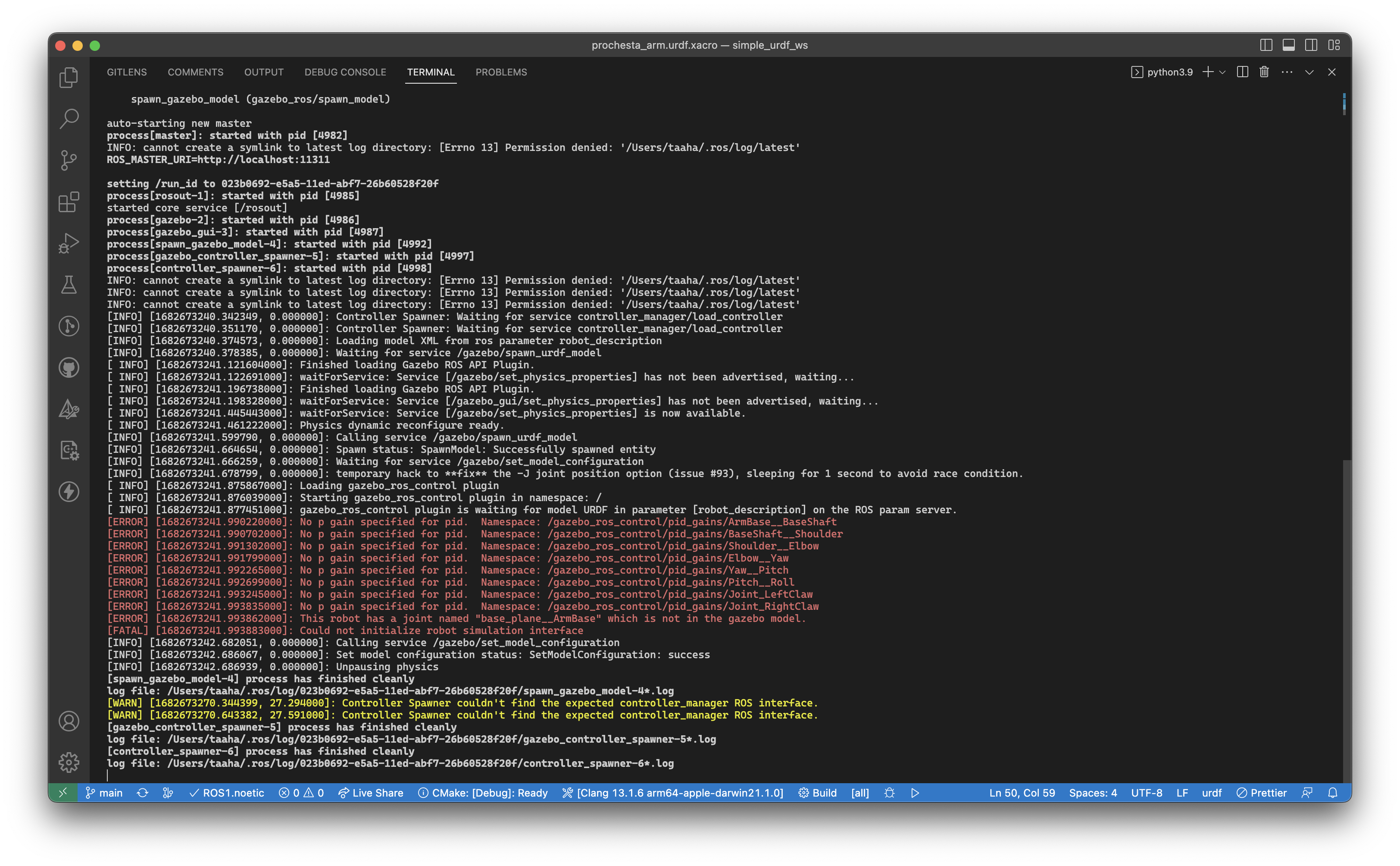
After launch the error I get:
[ERROR] [1681988267.705543000]: This robot has a joint named "base_plane__ArmBase" which is not in the gazebo model.
[FATAL] [1681988267.705556000]: Could not initialize robot simulation interface
…
[WARN] [1681988296.560628, 28.000000]: Controller Spawner couldn't find the expected controller_manager ROS interface.
[WARN] [1681988296.561593, 28.001000]: Controller Spawner couldn't find the expected controller_manager ROS interface.
The gazebo_ros_controller plugin doesn’t load. I have a similar arm which I have set up exactly the same way and that works expectedly whereas this one just falls down in the gazebo.
I have found similar problems in this forum and over the internet, but none of them works.
Here is the github repository for both the robots. mybot is the one that runs successfully.
GitHub
TIA.