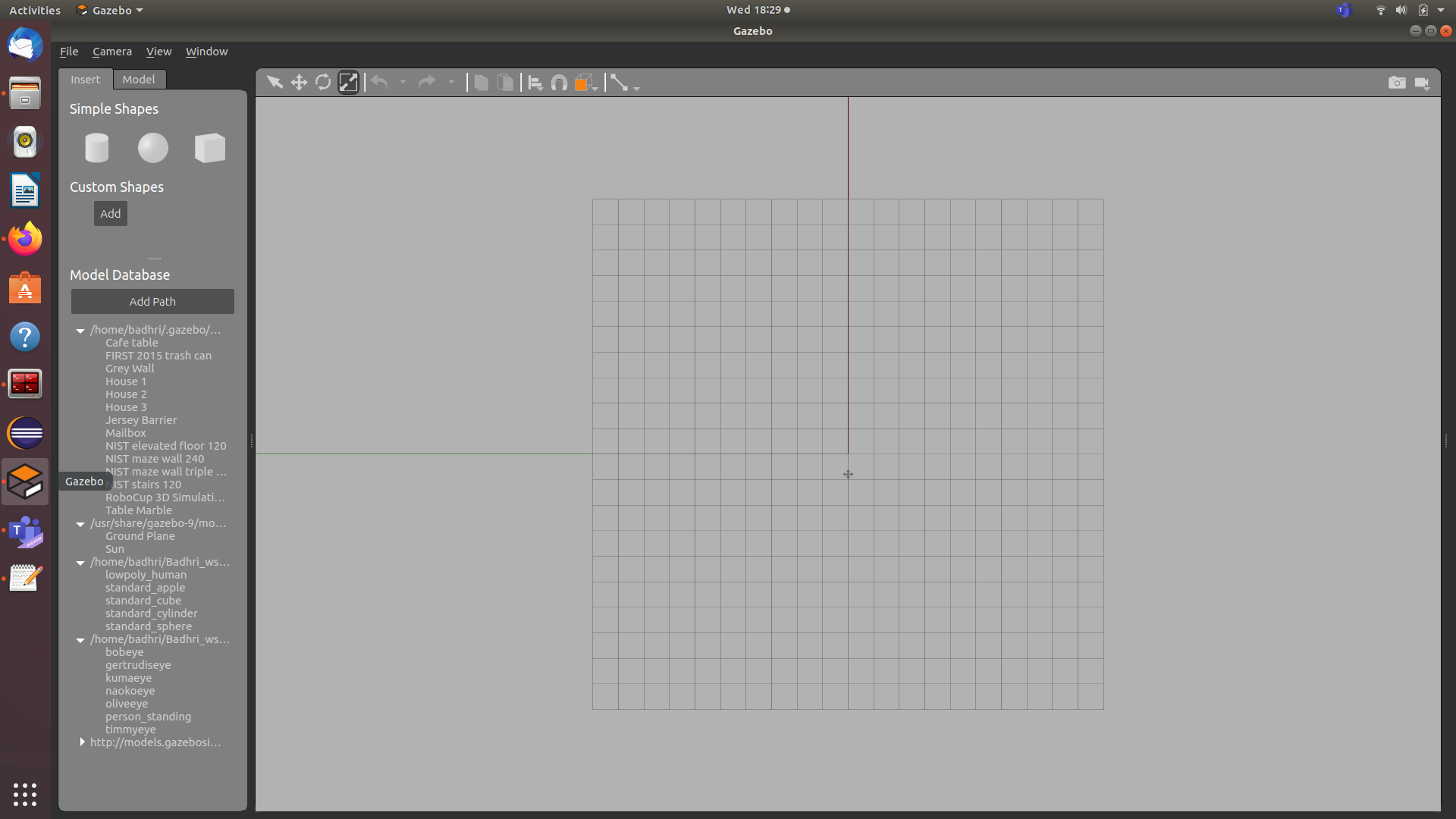
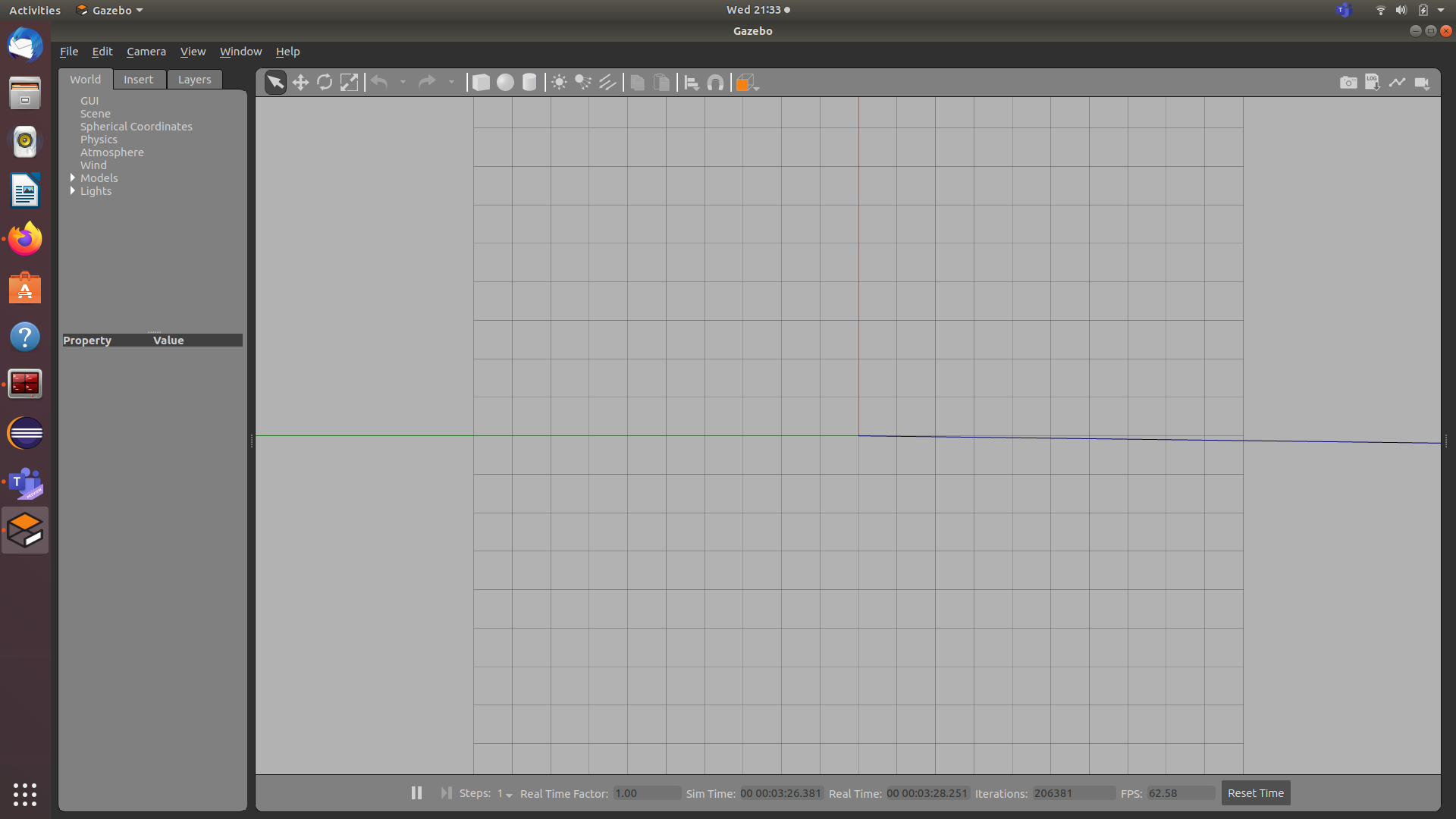
hello there, iam trying to work on ‘line following drone’ using this ROS Developers LIVE Class #86: How to use OpenCV with ROS - YouTube , but instead of using ROS Development Studio, iam using it locally in my PC ROS Melodic version(even tried in ROS Kinetic version). I tried launching the simulation environment using the command “roslaunch drone_in_line start_sim.launch” but the in gazebo it isn’t loading as illustrated in the video. i get a unloaded environment where the drone falls off due to no plane to land on. i have added the pic of my resulting gazebo simulation.
please do let me know what is the solution so i can run the same tutorial in my pc locally and connect with my real ardrone 2.0
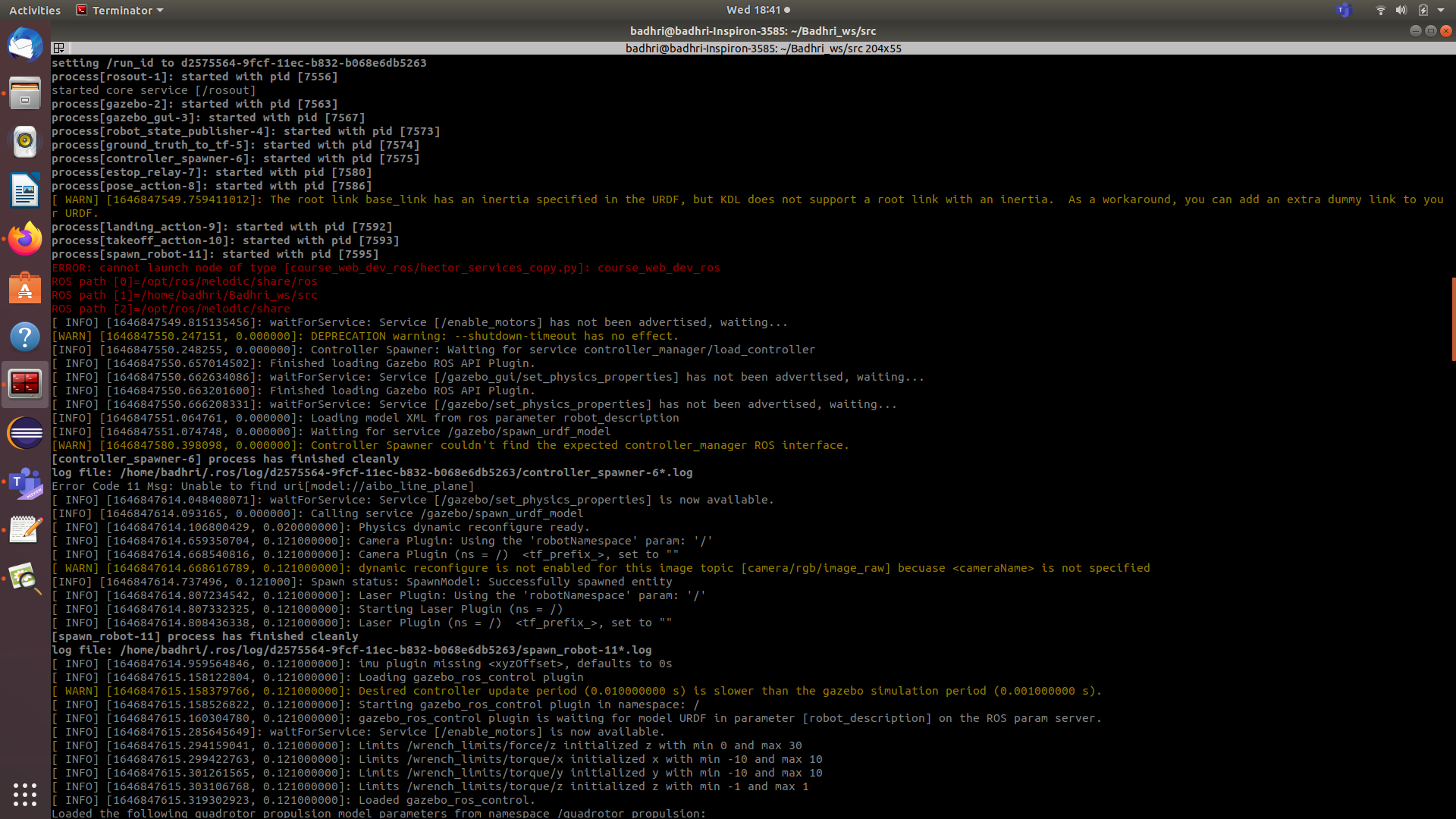
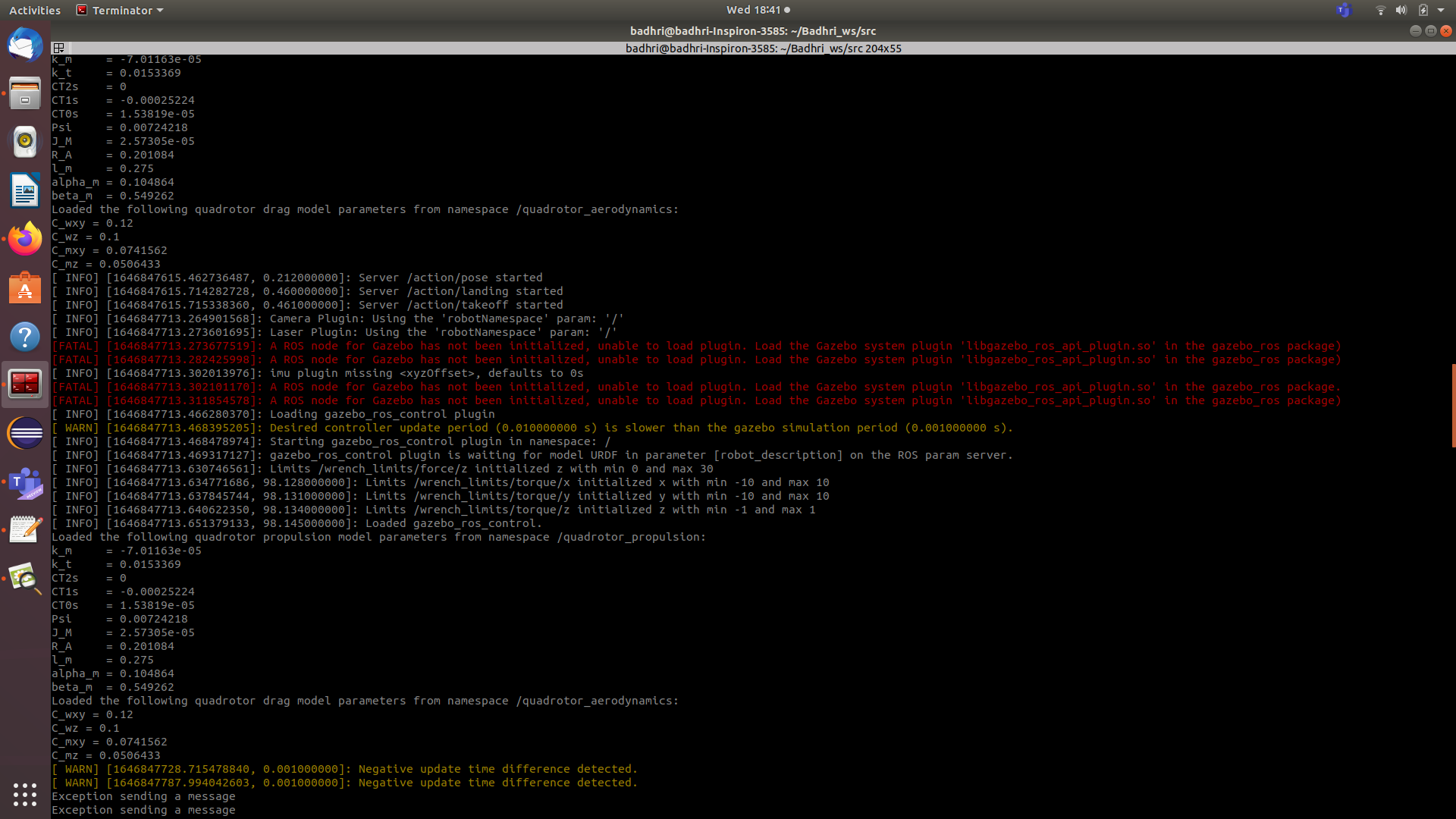
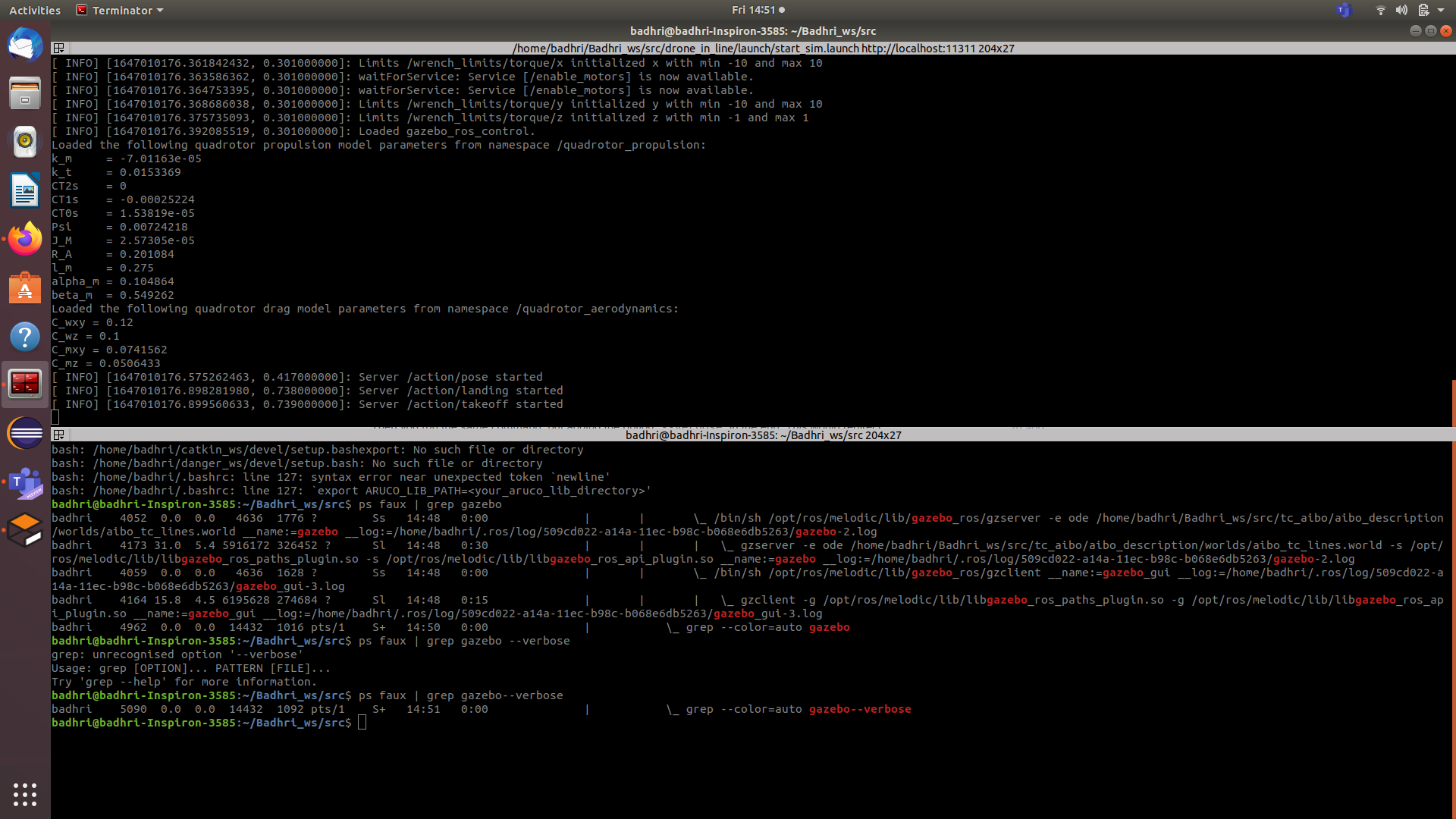
i get the following errors in the terminal while the gazebo runs,
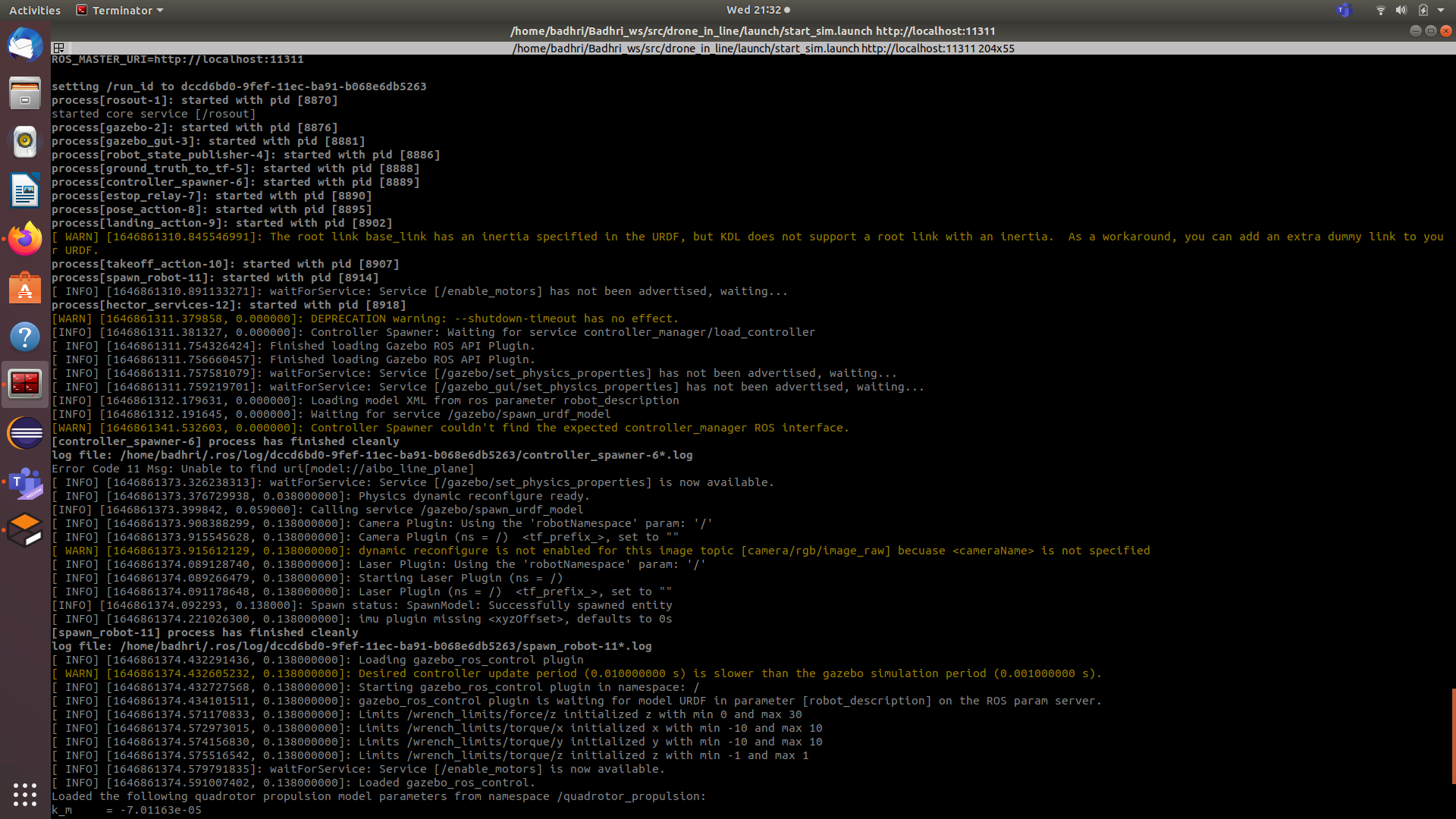
hello there, thank you for the reply. i tried the above process, but unfortunately i still got the same issue in the gazebo simulation, but this time there are no errors…just few warnings!
This will show you the command used to launch gazebo.
Then you run the same command, but adding the option “--verbose” in the end. This would redirect the logs of gazebo to the screen, then you can know why it is not showing something.
There are also logs in the “~/.ros” and “~/.gazebo” folders.