Hi,
I am doing Gurdy modelling exercise. I use the .py named inertia_calculator offered in course, just copied that. But the results I got from this .py of inertia are different with solutions. How does the solution get the inertial data? Is there difference in calculation method of inertia? Anyone else have the same problem as well?
Thank you
I found that:
1.
the inertias of lowerleg and upperleg take the mass value as 0.1, but the given data is 0.01;
2.
the inertias of foot_link are not divided by 5;
3.
the inertia of head_link takes mass value as 0.001, but the given data is 0.01;
Can anyone confirm that?
Could you please specify the course you are taking? As well as the exercise number.
Hi, @bayodesegun,
the course is “URDF for robot modelling”. The exercise is “create the URDF files for a Gurdy Robot from scratch.” And this exercise has 2 versions of solution. One is with so-called “head_upperlegMi_yaw_joint”, another without. But inertia problems exist in both of them.
1 Like
Hi,
What kind of issue sare we talking exactly? I stehre a gazebo spawn issue? Is the robot exploding due to instabilities? Is the inertia just not coinciding with the 3D rigid body bounding box?
As long as you are coherent with the weights when calculating the inertias, it shouldn’t make the simulation crash, unless you weight are too low and controllers not adjusted for that.
Hoping to hear more details on the issue ![]()
Hi @duckfrost2,
the problem is that the inertia vlaues given in solutions are not reasonable. If the values stay as what shown in solution, you can open ‘inertias-view’ in Gazebo, and find that the inertias are apprantly not corresponding with ‘visual’ model. As a result, values of inertias in solution are not correct, I think.
For example, in solution it defines ‘inertial’ of <head_link> as:
inertia ixx=“7.58333333333e-07” ixy=“0.0” ixz=“0.0” iyy=“7.58333333333e-07” iyz=“0.0” izz=“1.25e-06”
but it should be:
inertia ixx=“7.58333e-06” ixy=“0” ixz=“0” iyy=“7.58333e-06” iyz=“0” izz=“1.25e-05”
my calculation is 10 times bigger than solution.
A post was split to a new topic: Questions about questions about my_gurdy_demo.py
Hi probably becuas eyou set the mas ten times bigger. Is not big deal and the best solution is the one that makes your robot move aperently correct. Could you send some images of video ?
Hi @duckfrost2
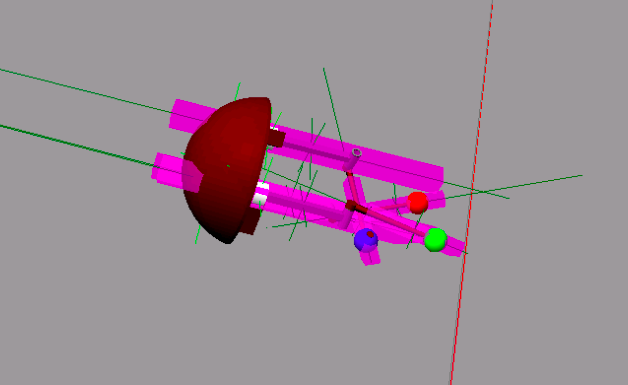
This is the modelling, whose inertias are directly from solutions (which I said has problems, head_link with too small inertia, and upper_legs with too big inertias):
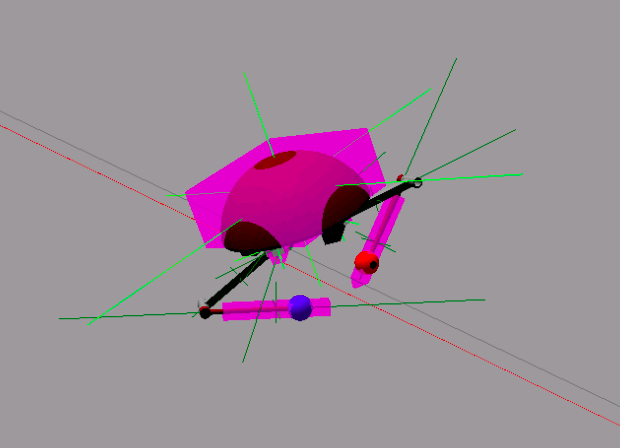
And this is the modelling, whose inertias are calculated from “inertia_calculator.py” (which it should be):
Ok I see,
The inertias of Gurdy are slightly off because we want it to be able to come to its feet every time.
The legs are correct in the solution, and the body in the second one is better calculated. The solution wasn’t calculated 100% correct, just to make it behave properly.
ok, I thought inertias must correspong to real situation. Thanks.
This topic was automatically closed after 3 days. New replies are no longer allowed.