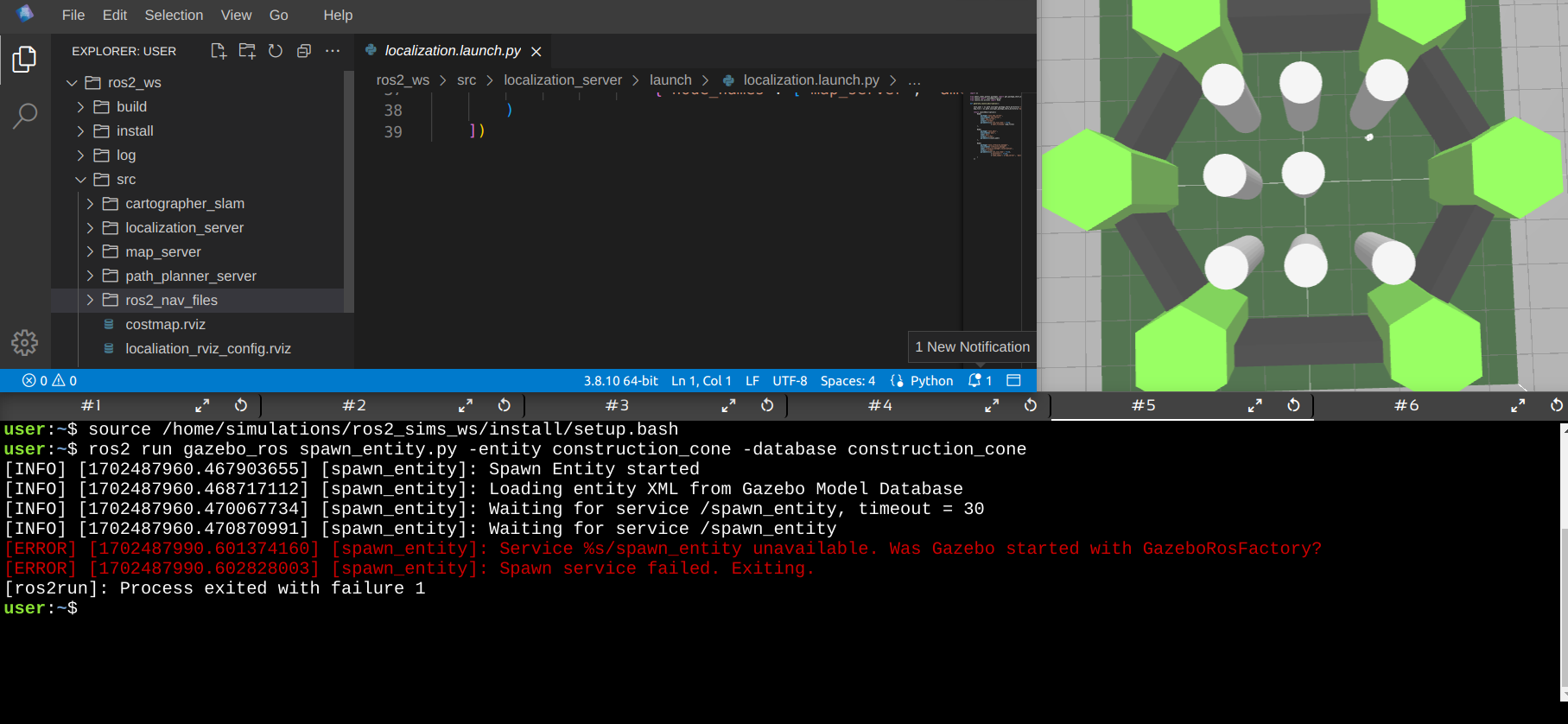
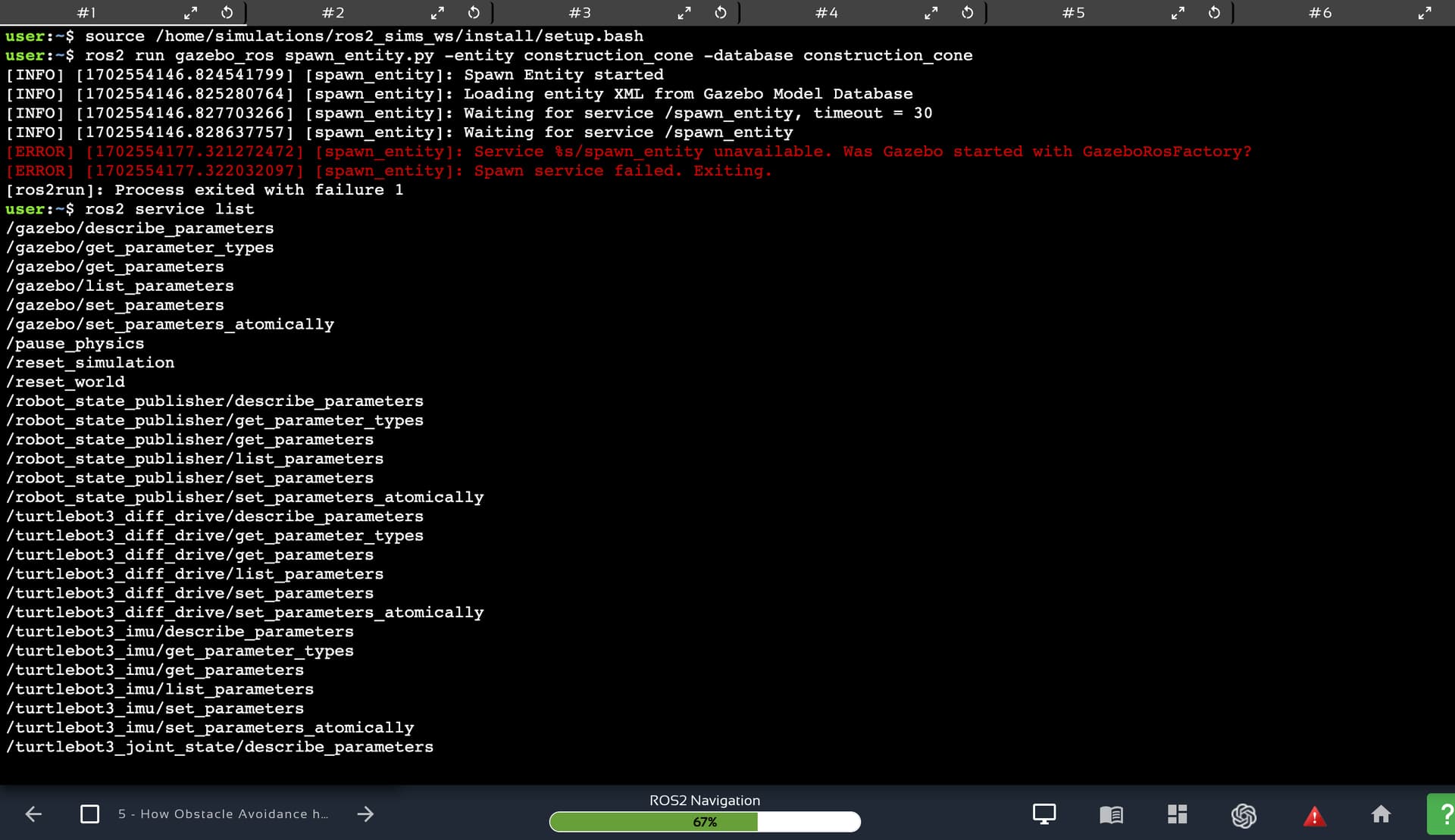
user:~$ source /home/simulations/ros2_sims_ws/install/setup.bash
user:~$ ros2 run gazebo_ros spawn_entity.py -entity construction_cone -database construction_cone
[INFO] [1702487960.467903655] [spawn_entity]: Spawn Entity started
[INFO] [1702487960.468717112] [spawn_entity]: Loading entity XML from Gazebo Model Database
[INFO] [1702487960.470067734] [spawn_entity]: Waiting for service /spawn_entity, timeout = 30
[INFO] [1702487960.470870991] [spawn_entity]: Waiting for service /spawn_entity
[ERROR] [1702487990.601374160] [spawn_entity]: Service %s/spawn_entity unavailable. Was Gazebo started with GazeboRosFactory?
[ERROR] [1702487990.602828003] [spawn_entity]: Spawn service failed. Exiting.
[ros2run]: Process exited with failure 1
Hi @kevpretell,
I have the same issue than you when I try to follow the instruction of the notebook.
By looking in default.log file by doing $cd ~/.gazebo/ and open with vi the default.log file, I have these logs:
(1702509557 928853512) [Wrn] [FuelModelDatabase.cc:313] URI not supported by Fuel [model://construction_cone]
(1702509557 928895069) [Wrn] [SystemPaths.cc:459] File or path does not exist [""] [model://construction_cone]
(1702509561 145562657) [Wrn] [ModelDatabase.cc:340] Getting models from[http://models.gazebosim.org/]. This may take a few seconds.
(1702509691 52720936) [Wrn] [ModelDatabase.cc:212] Unable to connect to model database using [http://models.gazebosim.org//database.config]. Only locally installed models will be available.
It seems that the ROS environement of the project is not able to connect to the model database (http://models.gazebosim.org/). It should be possible to spawn models already present in the local installation.