I faced with a problem with unit 2 at course “fuse sensor data to improve localization” when I tried to launch rviz for summit_xl robot. I think it’s a bug at the .rviz description file
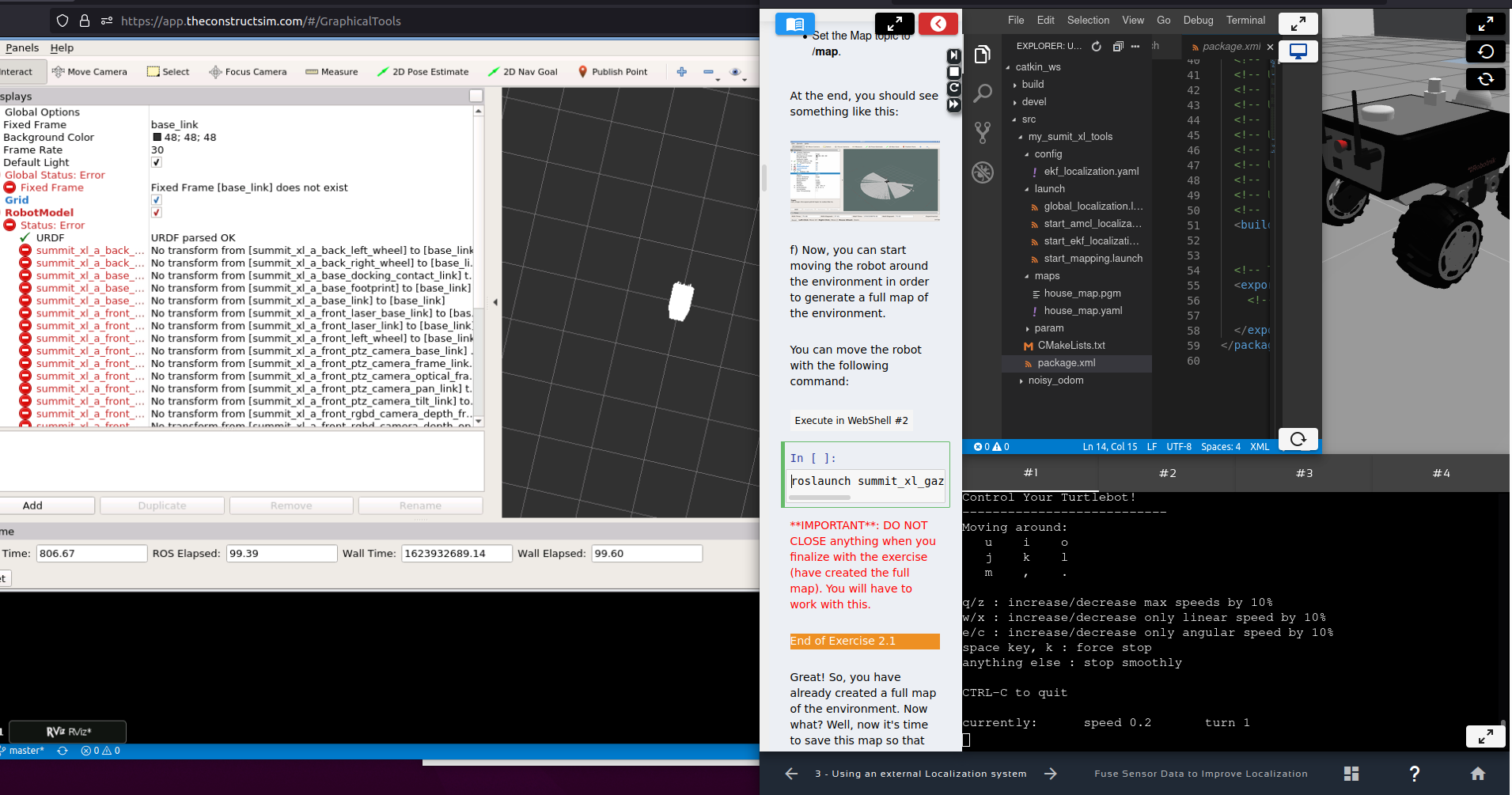
And of course the transformation is failed and it’s impossible to get some reasonable data from odometry\laser