Hello, I am running UR10 in my gazebo via this repo: GitHub - IFRA-Cranfield/ros2_RobotSimulation at humble
I am trying to write a teleop python code for UR10 where I can control x,y,z, roll pitch, and yaw pose using a joystick. Does anyone in the community knows how to implement this? I understand I have to use KDLKinematics, but I do not know how to use my UR10’s URDF to extract the jacobian matrix and use it with the change in end effector’s pose to find the change in joint states. Any help on this matter would be highly appreciated. Thanks!
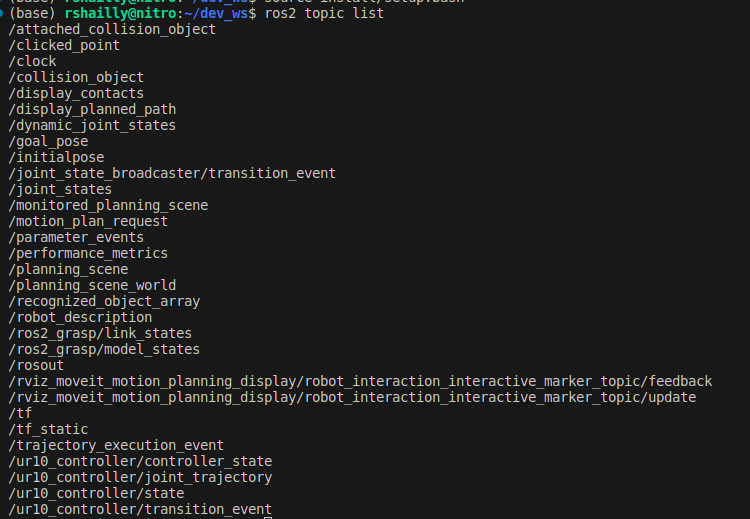
Here are the list of topics I can access: