Required Info:
Operating System:
Ubuntu 22.04
ROS2 version:
Humble binaries
Hello everyone,
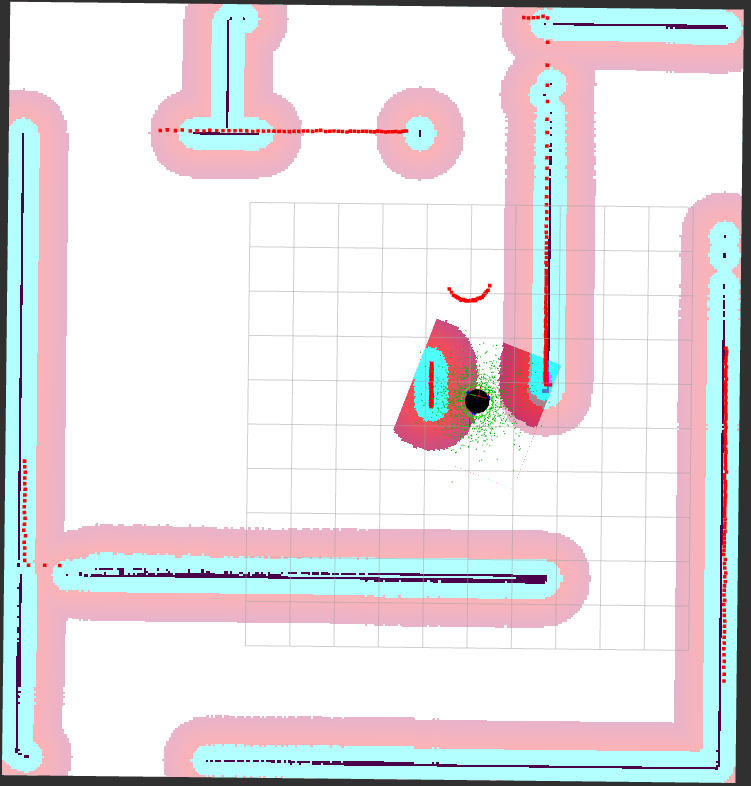
I am currently working on a navigation project using ROS2 and have encountered an issue with the global costmap. New obstacles are correctly detected and reflected in the local costmap, but they do not appear in the global costmap.
Problem Description
New obstacles are visible in the local costmap but are not shown in the global costmap.
Despite using the same laser scan data, the global costmap is not updating with the new obstacles.
Questions
What settings should I check to ensure that the global costmap reflects the same obstacle information as the local costmap?
Are there specific configurations in the global costmap’s obstacle layer that I should verify?
Has anyone experienced a similar issue and can share their insights or solutions?
Thank you in advance for your help!
here is my nav2 yaml and Screenshot of the current situation
`amcl:
ros__parameters:
use_sim_time: False
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
amcl_map_client:
ros__parameters:
use_sim_time: False
amcl_rclcpp_node:
ros__parameters:
use_sim_time: False
bt_navigator:
ros__parameters:
use_sim_time: False
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml"
bt_loop_duration: 10
default_server_timeout: 20
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: False
controller_server:
ros__parameters:
use_sim_time: False
controller_frequency: 10.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"]
controller_plugins: ["FollowPath"]
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
general_goal_checker:
stateful: True
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 0.7
max_vel_y: 0.0
max_vel_theta: 1.0
min_speed_xy: 0.0
max_speed_xy: 0.7
min_speed_theta: 0.0
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -3.2
vx_samples: 20
vy_samples: 0
vtheta_samples: 40
sim_time: 2.0
linear_granularity: 0.05
angular_granularity: 0.025
transform_tolerance: 0.2
xy_goal_tolerance: 0.05
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 5.0
RotateToGoal.lookahead_time: -1.0
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: False
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: False
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.35
plugins: ["obstacle_layer", "voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
inflation_radius: 1.0
cost_scaling_factor: 0.5
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 7.5
obstacle_min_range: 0.0
static_layer:
map_subscribe_transient_local: True
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: False
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: true
robot_radius: 0.35
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "voxel_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 7.0
raytrace_min_range: 0.0
obstacle_max_range: 7.5
obstacle_min_range: 0.0
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 7.0
raytrace_min_range: 0.0
obstacle_max_range: 7.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 0.5
inflation_radius: 1.0
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: True
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
map_server:
ros__parameters:
use_sim_time: False
yaml_filename: "map.yaml"
map_saver:
ros__parameters:
use_sim_time: False
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: True
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: False
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: true
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: False
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "backup", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
backup:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom
robot_base_frame: base_link
transform_timeout: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
robot_state_publisher:
ros__parameters:
use_sim_time: False
waypoint_follower:
ros__parameters:
loop_rate: 200
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200
`
and here is my navigation2 launch file
~~
def generate_launch_description():
start_rviz = LaunchConfiguration('start_rviz')
use_sim = LaunchConfiguration('use_sim')
map_yaml_file = LaunchConfiguration(
'map_yaml_file',
default=PathJoinSubstitution(
[
FindPackageShare('swerve_nav2'),
'map',
'map.yaml'
]
)
)
params_file = LaunchConfiguration(
'params_file',
default=PathJoinSubstitution(
[
FindPackageShare('swerve_nav2'),
'param',
'swerve_robot.yaml'
]
)
)
nav2_launch_file_dir = PathJoinSubstitution(
[
FindPackageShare('nav2_bringup'),
'launch',
]
)
rviz_config_file = PathJoinSubstitution(
[
FindPackageShare('swerve_nav2'),
'rviz',
'nav2.rviz'
]
)
return LaunchDescription([
DeclareLaunchArgument(
'start_rviz',
default_value='true',
description='Whether execute rviz2'),
DeclareLaunchArgument(
'use_sim',
default_value='true',
description='Start robot in Gazebo simulation'),
DeclareLaunchArgument(
'map_yaml_file',
default_value=map_yaml_file,
description='Full path to map file to load'),
DeclareLaunchArgument(
'params_file',
default_value=params_file,
description='Full path to the ROS2 parameters file to use for all launched nodes'),
# DeclareLaunchArgument(
# 'autostart',
# default_value='true',
# description='Automatically startup the nav2 stack'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_yaml_file,
'use_sim_time': use_sim,
'params_file': params_file,
# 'autostart': autostart,
# 'use_respawn': True,
}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_file],
output='screen',
condition=IfCondition(start_rviz)),
])